

5.4. Пример
Грузовой лифт обслуживает два этажа. Для управления лифтом имеется по одной кнопке на каждом из этажей:
на нижнем этаже для подачи команды на подъем (up);
на верхнем этаже для подачи команды на спуск (down).
Для индикации положения лифтовой кабины установлены два концевых выключателя; верхний (in1) и нижний (in2), которые предназначены для индикации положения лифтовой кабины.
Программа в виде диаграммы, представленная на рис. 3.13, позволяет дать описание структуры алгоритма управления лифтом при помощи операторов языка SFC.
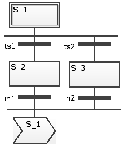
Рис. 3.13. Программа управления лифтом
Она представляет собой последовательность шагов в цикле управления. Логика перехода от одного шага к другому определяется значением операторов перехода, располагающихся между шагами.
Каждому шагу программы соответствует действие (движение вверх UPили внизDOWN). Переход к следующему шагу разрешается в случае истинности логического условия перехода (например, при срабатывании верхнего концевого выключателя).
Начальный шаг S_1 активизируется в начале выполнения программы. Особенность данной программы заключается в том, что имеется разветвление логики управления лифтом в соответствии с выбираемым действием: движение вверх или вниз в зависимости от положения лифта в текущий момент времени.
Если грузовой лифт находится на первом этаже, то выполняется переход от шага S_1 к шагуS_2 в том случае, если выполняется логическое условиеts1: (tsl =in2ANDup), гдеin2 – нижний концевой выключатель;AND– логическое И;up– кнопка вверх (рис. 3.14)

Рис. 3.14. Логическое условие ts1
При этом шаг S_1_1 переходит в неактивное состояние, шагS_l_2 становится активным: лифт движется вверх. Переходinl от шагаS_1_2 к шагуS_1_1 разрешается в тот момент, когда лифт поднимется на второй этаж, в результате чего произойдет срабатывание верхнего концевого выключателя. ШагS_l_2 становится неактивным, и выполняется переход к шагуS_1_1, который будет оставаться активным до тех пор, пока не поступит команда down.
Если грузовой лифт находится на втором этаже, то разрешается переход ts2 от шагаS_l_1 к шагуS_l_3, когда становится истинным логическое условие (ts2 =inl.AND.down), гдеinl - верхний концевой выключатель;AND– логическое И;down– кнопка вниз (рис. 3.15)
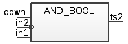
Рис. 3.15. Логическое условие ts2
При этом шаг S_1 переходит в неактивное состояние, шагS_3 становится активным: лифт движется вниз. Переходin2 от шагаS_3 к шагуS_1 разрешается в тот момент, когда лифт опустится на первый этаж, в результате чего произойдет срабатывание нижнего концевого выключателя. ШагS_3 станет неактивным, и произойдет переход к шагуS_1, который будет оставаться активным до тех пор, пока не поступит командаup.
4. Элементы микропроцессорных устройств
4.1 Цифро-аналоговые преобразователи
Цифро-аналоговый преобразователь (ЦАП) – функциональный узел, однозначно преобразующий кодовые комбинации цифрового сигнала в значения аналогового сигнала. Основой для нахождения однозначного соответствия может служить напряжение на выходе ЦАП
 ,
,
где Uоп– опорное напряжение;X{х1,х2, ....хn} – цифровой код;хпринимают значения 0 или 1.
При определенном UопкаждомуXiна выходе устройства соответствует напряжениеUвыхi.
В цифро-аналоговых преобразователях используют три основных двоичных кода: прямой, смещенный, дополнительный. Графики соответствия цифровых кодов Хвхи аналогового напряженияUвыхпри прямом (а), смещенном (б) и дополнительном (в) кодах показаны на рис. 4.1.
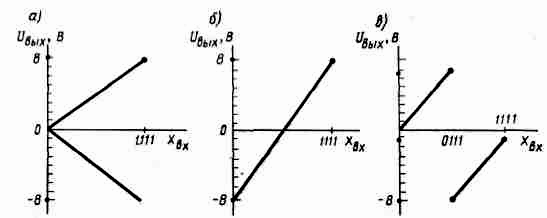
Рис. 4.1. Графики соответствия цифровых кодов и аналоговых напряжений
Наиболее просто определяется соответствие цифровых и аналоговых величин при прямом коде. Этот код удобен при преобразовании сигналов следящих систем, так как при переходе через нуль не меняются старшие разряды кода, что позволяет реализовать линейный переход от малых положительных к малым отрицательным выходным напряжениям. Для преобразования как положительных, так и отрицательных кодов используют знаковый разряд, который управляет переключением выходного напряжения ЦАП.
Для исключения коммутирующих элементов из схемы ЦАП используют смещенный код, являющийся наиболее простым для реализации в схеме преобразователя.
При применении дополнительного кода положительные числа преобразуются так же, как для прямого кода, а отрицательные – двоичным дополнением соответствующего положительного числа (инверсия всех разрядов с последующим добавлением единицы в младший разряд).
Из табл. 4.1, соответствующей рис. 4.1, видно, что прямой код дает возможность использовать в два раза большее разрешение по сравнению со смещенным и дополнительным кодами.
Таблица 4.1. Соответствие между кодом и выходным сигналом
|
Прямой код |
Смещенный код |
Дополнительный код | ||||
|
Хвх. |
±Uвых., В |
Хвх. |
±Uвых., В |
Хвх |
±Uвых., В | |
|
0000 |
0,000 |
0000 |
-8,00 |
0111 |
7 | |
|
0001 |
0,500 |
0001 |
-6,93 |
0110 |
6 | |
|
0010 |
1,000 |
0010 |
-5,87 |
0101 |
5 | |
|
0011 |
1,500 |
0011 |
-4,80 |
0100 |
4 | |
|
0100 |
2,000 |
0100 |
-3,73 |
0011 |
3 | |
|
0101 |
2,500 |
0101 |
-2,67 |
0010 |
2 | |
|
0110 |
3,000 |
0110 |
-1,60 |
0001 |
1 | |
|
0111 |
3,500 |
0111 |
-0,53 |
0000 |
0 | |
|
1000 |
4,000 |
1000 |
0,53 |
1111 |
-1 | |
|
1001 |
4,500 |
1001 |
1,60 |
1110 |
-2 | |
|
1010 |
5,000 |
1010 |
2,67 |
1101 |
-3 | |
|
1011 |
5,500 |
1011 |
3,73 |
1100 |
- 4 | |
|
1100 |
6,000 |
1100 |
4,80 |
1011 |
-5 | |
|
1101 |
6,500 |
1101 |
5,87 |
1010 |
-6 | |
|
1110 |
7,000 |
1110 |
6,93 |
1001 |
- 7 | |
|
1111 |
7,500 |
1111 |
8,00 |
1000 |
- 8 | |
Цифро-аналоговое преобразование состоит в суммировании эталонных значений напряжения, соответствующих разрядам входного кода, причем в суммировании будут участвовать только те эталоны, для которых в соответствующих разрядах стоит единица. Структурная схема ЦАП в общем виде показана на рис. 4.2.
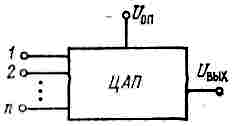
Рис. 4.2. Структурная схема ЦАП
Основными параметрами ЦАП являются:
Разрешающая способность, определяемая количеством двоичных разрядов входного кода и характеризующаяся возможным количеством уровней аналогового сигнала.
Точность, определяемая наибольшим значением отклонения аналогового сигнала от расчетного. Она обычно выражается в виде половины уровня сигнала, соответствующего младшему значащему разряду (МЗР). Суммарная ошибка, вносимая элементами ЦАП, не должна превышать указанную погрешность квантования.
Нелинейность, характеризующаяся максимальным отклонением линейно-нарастающего выходного напряжения от прямой линии, соединяющей точки нуля и максимального выходного сигнала (обычно не выше ±1/2 значения МЗР).
Время преобразования (установления), определяемое интервалом времени от момента подачи цифрового сигнала до момента достижения выходным сигналом установившегося значения.
Как правило, ЦАП содержит резистивную матрицу, с помощью которой формируются выходные сигналы, пропорциональные входному коду; набор токовых ключей, реализующих коэффициенты двоичных разрядов; выходной усилитель и источник опорного стабилизированного напряжения. Кроме того, обычно в схему включают устройство, обеспечивающее согласование входа ЦАП с цифровыми микросхемами.