

4.2.2 Метод поразрядного кодирования
Метод поразрядного кодирования (уравновешивания) предусматривает наличие нескольких эталонов, обычно пропорциональных по величине степеням числа 2, и сравнение этих эталонов с аналоговой величиной. Сравнение начинается с эталона старшего разряда. В зависимости от результата этого сравнения формируется значение старшего разряда выходного кода. Если эталон больше входной величины, то в старшем разряде ставится 0 и далее производится уравновешивание входной величины следующим по значению эталоном. Если эталон равен или меньше входной величины, то в старшем разряде выходного кода ставится 1 и в дальнейшем производится уравновешивание разности между входной величиной и первым эталоном.
Для построения преобразователей с более высоким быстродействием используется метод поразрядного кодирования. Схема одного из вариантов подобного преобразователя приведена на рис. 4.7.
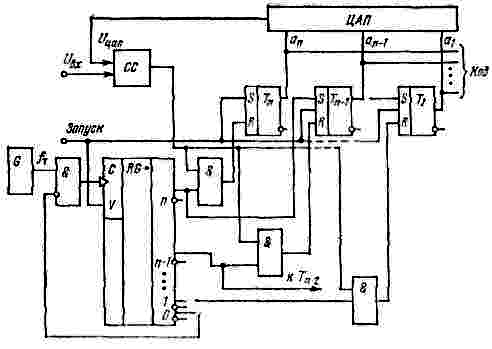
Рис. 4.7. АЦП поразрядного кодирования
При подаче импульса запуска триггер
старшего разряда Тnустанавливается в состояние 1, а остальные
триггеры – в 0, одновременно записывается 1 в
старший разряд регистра сдвига. В первом
такте работы на компаратор подаютсяUвхиUэп, снимаемое
с выхода ЦАП и соответствующее 1 старшего
разряда. ЕслиUвх>Uэп, на выходе
СС сигнала не будет и в старшем разряде
(Tn) сохранится 1. ЕслиUвх<Uэп, то СС
выдает сигнал, который через компаратор
вернетТnв
состояние 0. Одновременно произойдет
сдвиг 1 в регистре в (n– 1) разряд, что обеспечит подачу
эталонного напряженияUэ(n–1)с ЦАП на СС. Далее процесс преобразования
идет аналогично. В результате преобразованияUвхуравновешивается суммой
эталонных напряжений, снимаемых с ЦАП:
– в 0, одновременно записывается 1 в
старший разряд регистра сдвига. В первом
такте работы на компаратор подаютсяUвхиUэп, снимаемое
с выхода ЦАП и соответствующее 1 старшего
разряда. ЕслиUвх>Uэп, на выходе
СС сигнала не будет и в старшем разряде
(Tn) сохранится 1. ЕслиUвх<Uэп, то СС
выдает сигнал, который через компаратор
вернетТnв
состояние 0. Одновременно произойдет
сдвиг 1 в регистре в (n– 1) разряд, что обеспечит подачу
эталонного напряженияUэ(n–1)с ЦАП на СС. Далее процесс преобразования
идет аналогично. В результате преобразованияUвхуравновешивается суммой
эталонных напряжений, снимаемых с ЦАП:

где ai– коэффициенты 1 и 0 в разрядах выходного кода, снимаемого с триггеровТn–Т1;Uэi– эталонное напряжение ЦАП, соответствующееi-разряду.
В рассмотренном АЦП время преобразования постоянно и определяется числом разрядов и тактовой частотой Tпр=n/fт. Погрешность преобразования зависит от ошибок ЦАП и чувствительности СС. Имеются более сложные модификации рассмотренного преобразователя, которые характеризуются повышенным быстродействием и точностью.
4.2.3 Метод считывания
Метод считывания (параллельного преобразования) подразумевает наличие 2n–1 эталонов приn-разрядном двоичном коде. Входная величина одновременно сравнивается со всеми эталонами. В результате преобразования получается параллельный код в виде сигналов на выходах 2n–1 схем сравнения (компараторов).
Наибольшим быстродействием обладают преобразователи, построенные по методу считывания. Пример такого преобразования показан на рис. 4.8.
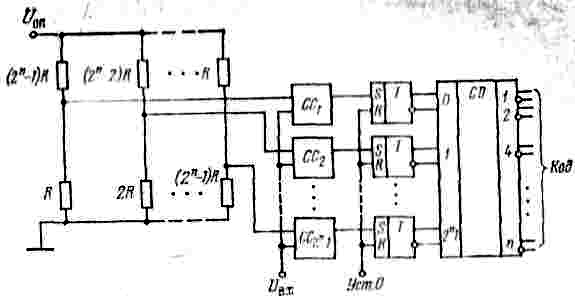
Рис. 4.8. АЦП, построенный по методу считывания
В этом преобразователе 2n– 1 опорных напряжений формируются с помощью резистивного делителя. Каждое из опорных напряжений подается вместе сUвхна соответствующий компаратор. Срабатывают лишь те компараторы, у которыхUвх>Uопi. Результат сравнения через фиксирующие триггеры подается на шифратор, преобразующий его в код. Преобразование производится за два такта, время преобразования 10…100 нс. Недостаток этого преобразователя в большом числе компараторов, которое быстро возрастает с ростом числа разрядовn.