

3.4.1.1. Автоматический преобразователь интерфейсовUsb/rs-485 овен ас4
Устройство предназначено для взаимного преобразования сигналов интерфейсов USBиRS-485. Позволяет подключать к промышленной сетиRS-485 персональный компьютер, имеющийUSB-порт
Обеспечивает автоматическое определение направления передачи данных, гальваническую изоляцию входов и создание виртуального COM-порта при подключении прибора к ПК, что позволяет без дополнительной адаптации использовать информационные системы (SCADA, конфигураторы), работающие с аппаратнымCOM-портом. Питание преобразователя осуществляется от шиныUSB. Схема подключения преобразователя АС4 к сетевым приборам показана на рис. 3.21.
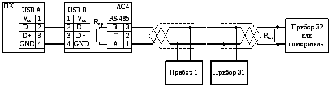
Рис. 3.21. Схема подключения преобразователя АС4
При построении сети с использованием интерфейса связи RS-485 к линии, выполненной витой парой, может быть подключено до 32 приборов, а при использовании усилителя сигнала – до 256 приборов. В качестве усилителя можно использовать повторитель сигналов интерфейса RS-485 АС5.
Преобразователь АС4 имеет встроенные согласующие резисторы сопротивлением 100 и 120 Ом.
Подключение АС4 к ПК производится с помощью стандартного USB-кабеля.
Технические характеристики преобразователя АС4 приведены в табл. 3.7.
Таблица 3.7. Технические характеристики преобразователя АС4
|
Питание | |
|
Постоянное напряжение (на шине USB) |
4,75…5,25 В |
|
Потребляемая мощность |
не более 0,5 ВА |
|
Допустимое напряжение гальванической изоляции входов |
не менее 1500 В |
|
Интерфейс USB | |
|
Стандарт интерфейса |
USB2.0 |
|
Длина линии связи с внешним устройством |
не более 3 м |
|
Скорость обмена данными |
до 115200 бит/с |
|
Используемые линии передачи данных |
А(D+),В(D–) |
|
Интерфейс RS-485 | |
|
Стандарт интерфейса |
TIA/EIA-485 |
|
Длина линии связи с внешним устройством |
не более 1200 м |
|
Количество приборов в сети: – без использования усилителя сигнала – с использованием усилителя сигнала |
не более 32 не более 256 |
|
Используемые линии передачи данных |
А(D+),В(D–) |
3.4.2. Интерфейс «Токовая петля»
Интерфейс предназначен для передачи информации между устройствами с радиальной последовательной связью (ИРПС) и обеспечивает единые способы обмена информацией для различных устройств.
Подключение устройств осуществляется радиально посредством кабеля. Допускается использование в качестве соединительных линий выделенных пар в многожильных телефонных кабелях.
Интерфейс обеспечивает асинхронную передачу постоянным током (токовая петля) по 4-проводной дуплексной связи. В технически обоснованных случаях допустима и цепь взаимосвязи, указывающая состояние устройств. Взаимосвязью называется соединение для передачи последовательных двоичных сигналов с регулярной скоростью, определяемой стандартом или соглашениями.
Цепи взаимосвязи приведены в табл. 3.8. Сигналы в цепи 1 возникают в источнике и проходят к приемнику.
Таблица 3.8. Цепи интерфейса ИРПС
|
Номер |
Наименование |
Обозначение |
Направление |
|
1 |
Передаваемые данные |
ПД+/ПД– |
От И к П/ от П к И |
|
2 |
Принимаемые данные |
ПрД+/ПрД– |
От П к И / от И к П |
|
3 |
Готовность приемника (необязательная цепь) |
ГП+/ГП– |
От П к И / от И к П |
Знаки «+», «–» указывают направление тока в петле
Цепи 1, 2 и интервале между передаваемыми знаками или словами находятся в состоянии 1. Состояние 1 или 0 должно удерживаться в течение целого интервала сигнала. В случае, если устройство предназначено только для приема, цепь 1 остается разомкнутой. Цепь 3 в состоянии 1/0 указывает готовность/неготовность приемника к приему новой информации.
Формат передаваемой информации (в битах) следующий: старт – 1; передаваемые данные – 5,7 или 8; четность – 1 или отсутствует; стоп – 1,5 или 2. Формат кадра при последовательном асинхронном протоколе связи приведен на рис. 3.22.
Рис. 3.22. Формат кадра
В активном/пассивном режиме цепи взаимосвязи реализованы так, чтобы они питались от передатчика/приемника. Уровни сигналов для двух вариантов ИРПС приведены в таблице 3.9.
Таблица 3.9. Уровни сигналов ИРПС
|
Тип петли ИРПС |
Состояние |
Ток, мА |
|
40-миллиамперная токовая петля |
лог. 1 / 0 |
30÷50 / 5÷10 |
|
20-миллиамперная токовая петля |
лог. 1 / 0 |
15÷25 / 0÷3 |
Соединяемые оконечные устройства имеют гальваническое разделение, осуществляемое со стороны цепи взаимосвязи, которая не питается током. Номинальное значение изоляционного напряжения гальванического разделения – 500 В.
Максимальная длительность фронтов сигналов в конце линии, нагруженной на характеристическое сопротивление, не превышает 50 мкс. Цепи взаимосвязи обеспечивают передачу сигналов со скоростью 9600 бит/с на расстояние от 0 до 500 м. При передаче на большие расстояния пропорционально понижается скорость передачи.
Сигналы взаимосвязи должны приближаться к прямоугольной форме. Крутизна фронтов сигналов, измеряемых на выходных зажимах передатчика, нагруженного сопротивлением 100 Ом, не более 1 мкс.
Схема источника сигнального тока выполняется так, чтобы отключение нагрузки и короткое замыкание выходных зажимов или одного из них на землю не приводили к ее повреждению. Любое включение на приемной стороне выполняется так, чтобы при длительной нагрузке максимально допустимым током цепи взаимосвязи оно не приводило к повреждению приемника. Любая схема на приемной стороне рассчитана на исключение повреждения при замыкании проводников в цепи взаимосвязи.
Параметры приемника следующие: падение напряжения, измеряемое на входных зажимах приемника, в состоянии 1 в цепи взаимосвязи – не более 2,5 В; входная емкость – менее 10 нФ; приемник работает независимо от крутизны фронтов в диапазоне 0...50 мкс.
Цепи взаимосвязи выполняются витой парой. Типы применяемого разъема и кабеля не регламентируются, по своим параметрам они должны удовлетворять вышеприведенным требованиям.
Подключение оборудования по интерфейсу «Токовая петля», четырехпроводное включение, полный дуплекс показано на рис. 3.23.
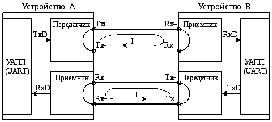
Рис. 3.23. Подключение ИРПС