

14.4. Система управления положением вторичного зеркала телескопа
Для инфракрасного телескопа, установленного на «Шаттл», необходимо обеспечение устойчивости положения цели с точностью в 0,25 угловых секунд. Структурная схема системы показана на рис. 14.6.
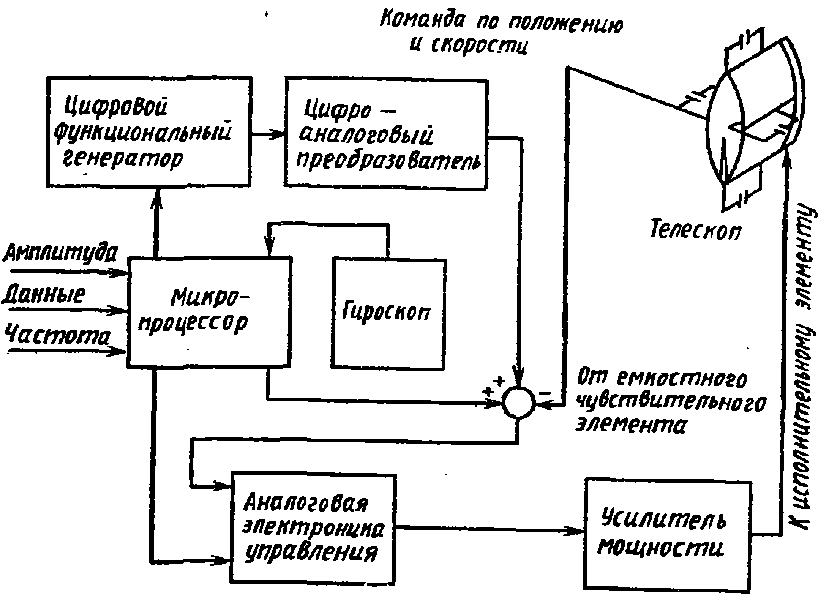
Рис. 14.6
Зеркало имеет свободу вращения вокруг вертикальной оси. Модель системы, используемая в полете, должна иметь две степени свободы вращения, хотя сканирование пространства должно происходить вокруг одной оси. Зеркало укреплено относительно оси, совпадающей с его вершиной. Гибкие подшипники устраняют гистерезис, связанный с обычными подшипниками. Максимальное угловое перемещение ограничено механическими упорами в диапазоне ±1°. При действительных рабочих условиях сканирования амплитуды угловых перемещений ограничены в диапазоне ± 5 угловых минут при частотах от 0 до 20 Гц. Более значительная угловая свобода допускает настройку в более широком диапазоне и полезна во время начальной оптической установки.
Вторичное зеркало имеет очень быстродействующий регулятор, на вход которого поступают команды по положению и по скорости. При обеспечении компенсации положения изображения входные ошибки положения от гироскопа, воспринимающего движение телескопа, используются для управления зеркалом. Точное управление положением изображения и оптической оси телескопа относительно его механической оси выполняются командами по положению. В телескопе эти команды передаются от главного вычислителя наведения и суммируются со специальными выходами от микропроцессора и с сигналами от емкостного чувствительного элемента. Управление зеркалом во время сканирования пространства производится специальным генератором формы волны, управляемым микропроцессором. Командная форма положения волны – трапецеидальная и формируется так, что для любой заданной частоты или амплитуды отношение между временем покоя и временем перехода поддерживается постоянным. Тем самым обеспечивается требование, что 90 % каждого цикла затрачивается на переход от двух крайних положений во время сканирования. Команда по скорости, вырабатываемая на основе трапецеидальной команды по положению, является серией импульсов, ширина которых приблизительно равна длине переходного периода.
Положение зеркала определяется при помощи дифференциальных измерений емкости между парой пластин и основанием, на котором закреплено зеркало. Можно измерить изменения в расстоянии до 2,5 нм между зеркалом и пластинами и, так как электроника чувствительного элемента использует частоту модуляции в 170 кГц, то потенциальная электромагнитная помеха от находящегося вблизи исполнительного элемента с его существенными токовыми импульсами по существу устраняется.
Закон регулирования является классическим пропорционально-интегро-дифференциальным (ПИД), осуществленным на аналоговой электронике. Микропроцессор играет только вспомогательную роль из-за большой полосы частот закона регулирования. Микропроцессор управляет усилением, стартом, командной формой волны и т.д. Использование гибридной системы обеспечивает гибкость и возможность справиться со специальными нелинейными условиями, например, при запуске системы, сохраняя при этом быстродействие аналогового регулятора.