

2.5.2. Синтез многотактных систем дискретной автоматики
Многотактные устройства реализуются в виде последовательностных схем, особенностью которых является наличие элементов памяти, хранящих данные о предыдущем состоянии. Способы построения последовательностных схем рассматриваются в разделе кибернетики, посвященном синтезу дискретных конечных автоматов. При разработке многотактных автоматических систем управления периодическими процессами, рабочими машинами и агрегатами можно использовать также циклические графики.
В качестве элементов памяти используются триггеры различных типов, например, RS-триггер,T-триггер. Описывать состояние триггеров, для большей наглядности принято временными диаграммами.
RS-триггер имеет два
входа: вход установки –Sи вход сброса –R, один
выходQ, который может
дополняться своей инверсией – .
Пример графического изображенияRS-триггера и временная
диаграмма работы приведено на рис. 2.9,
а и б, соответственно.
.
Пример графического изображенияRS-триггера и временная
диаграмма работы приведено на рис. 2.9,
а и б, соответственно.
 а)
а) б)
б)
Рис. 2.9. RS-триггер: а) условное изображение; б) временная диаграмма
Работа RS-триггера показана на временной диаграмме 2.9,б). Из диаграммы видно, что активный сигнал на входеSпереводит выход в состояние 1, которое остается и после снятия управляющего сигнала. Сигнал управления на входе сброса –R,устанавливает триггер в нулевое состояние. Значение выходного сигнала на инверсном выходе всегда противоположно значению состояния прямого выхода. ДляRS-триггера активное состояние обоих входов одновременно является запрещенным состоянием, которое следует исключать на стадии проектирования при разработке цифровых схем.
T-триггер, в отличии от предыдущего, управляется не уровнем входного сигнала, а его изменением – фронтом. Причем, в зависимости от конструкции триггера управление может происходить как по переднему, так и по заднему фронту. Условное графическое изображение и временная диаграмма работыT-триггера приведены на рис. 2.10, а и б, соответственно.
 а)
а)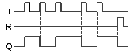 б)
б)
Рис.2.10. T-триггер: а) условное изображение; б) временная диаграмма
Временная диаграмма показывает, что изменение состояния выхода происходит при каждом поступлении переднего фронта импульса на вход триггера. Приведенный пример T-триггера снабжен дополнительным входом асинхронного сбросаR, который устанавливает триггер в исходное нулевое состояние.
При синтезе структуры системы сначала определяют условия включения и выключения элементов. Условие включения f (x) элементаХопределяется сигналом управляющего, промежуточного или другого элемента, изменение состояния которого во включающем такте вызывает включение рассматриваемого элемента. Условие выключенияf (x) элементаХопределяется сигналом элемента, изменение состояния которого в отключающем такте вызывает отключение данного элемента.
Элемент Хбудет находиться во включенном состоянии, если на входе системы управления выполнены условия его включения и не созданы условия для его выключения.
Следовательно, структурная формула, определяющая работу элемента Х-это конъюнкция условий включения и инверсия условий выключения и в общем виде запишется как
 . (2.4)
. (2.4)
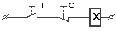
Запишем условие включения f (x) = П (во включающем такте изменяет свое состояние элемент П и значение его в этом такте равно единице). Условие выключенияf (x) = Ст (в отключающем такте изменяет свое состояние элемент СTи значение его в этом такте равно единице). Следовательно, исходная структурная формула для элементаХ в соответствии с (2.4)
 . (2.5)
. (2.5)
Однако эта структурная формула и составленная на ее основании схема (см. рис. 2.11,а) не реализуют заданную циклограмму, так как снятие управляющего сигнала П (П = 0) сразу после включения приводит к Х = 0, т.е. условия включения элементаХявляются недостаточными. Поэтому при синтезе систем и устройств автоматического управления после получения исходной структурной формулы элемента проводят проверку структуры. При не реализуемости функции в структурную формулу вводят вспомогательные и промежуточные элементы, элементы «память».
 а)
а)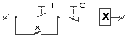 в)
в)
 б)
б) г)
г)
Рис. 2.11 Варианты схем, реализующих управляющую функцию
Первую проверку проводят с целью определения наличия условий включения f (x) в течение всего включающего периода. Еслиf (x) не претерпевает изменений в течение этого периода, то условия включения являются достаточными и поправка в условия срабатывания элементаХне вносится.
Если условия включения f (x) меняют свое значение во включающем периоде, то они являются недостаточными и требуют введения в структуру вспомогательного элемента (элемента «память»). Функцию такого вспомогательного элемента, обеспечивающего включенное состояние элементаХв течение всего периода включения, может выполнять специальное промежуточное реле р' или же самоблокировка элемента, т.е. обратная связь. Реле р' должно быть включено в период времени, когда включен элементX,но отсутствуют (после подачи командного сигнала) условия его включения. При самоблокировке структурная формула рассматриваемого элемента
 , (2.6)
, (2.6)
а при введении промежуточного реле р'
 . (2.7)
. (2.7)
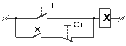
Таким образом, структурная формула в результате поправок (введения самоблокировки) запишется в виде
 . (2.8)
. (2.8)
Схема реализации (2.8) релейно-контактными элементами показана на рис. 2.11,б. Учитывая функциональную равносильность схем (см. рис. 2.11,б,в), структурная формула элемента Хможет быть представлена в виде
 . (2.9)
. (2.9)
Структурная формула (2.9) и схема ее реализации (рис. 2.11,в) в связи с эксплуатационными достоинствами предпочтительнее структуры (2.8) на рис. 2.11,б.