

Диссертация на соискание учёной степени
.pdfВеличина R/S носит название нормированного размаха. Как показал Херст [116], для многих временных рядов наблюдаемый нормированный размах хорошо описывается эмпирическим соотношением: R / S / 2 H .
Показатель Херста Н определяется через тангенс наклона прямой ln(R / S) H ln / 2 , полученной в результате аппроксимации точек прямой методом линейной регрессии в логарифмических координатах. Этот показатель характеризует скоррелированность членов исследуемого ряда.
При анализе результатов численных экспериментов по изучению зависимости Q(t) на интервале времени , вводилась новая переменная
N |
|
|
– число шагов dt на интервале времени . На рисунке 3.3 приведен |
|
|
||||
dt |
||||
|
|
|
||
пример |
( N R / S )-зависимостей (графиков Херста), построенных в |
|||
логарифмических координатах, для дискретного временного ряда Q(t) при двух различных значениях параметра эффективного трения Г (рис. 3.3а) и
при двух значениях коэффициента упругости канала К (рис. 3.3б).
|
|
Г=2 |
K=12 |
|
|
|
|
|
|
|
|
|
|
|
а. |
б. |
Рис 3.3. Результаты исследования временного ряда Q(t) методом Херста при различных значениях параметра эффективного трения (а); при различных значениях параметра упругости канала K (б).
На основании полученных зависимостей можно сделать вывод, что динамика RyR-канала в рамках ЭК-модели является сильно коррелированной (H ≈ 1.0) на относительно коротком промежутке времени,
сравнимом с длительностью конформационной релаксации канала в метастабильный минимум потенциала, соответствующий открытому
81

состоянию, и слабо коррелированной на длительных промежутках времени
(H ≈ 0.5).
Основываясь на результатах проведенного R/S-анализа, можно заключить, что в рамках электронно-конформационной модели динамика координаты Q канала является не только стохастической, но и детерминированной, причем на коротких интервалах времени, и при этом исследуемая система обладает «памятью».
Следует отметить, что на сегодняшний день в литературе отсутствуют экспериментальные данные, указывающие на фрактальные свойства RyR-
каналов, поэтому необходим более детальный экспериментальный анализ конформационных изменений RyR-канала с целью подтверждения результатов,
полученных с помощью представленной здесь модели.
Для предсказания поведения исследуемой системы требуется детальный параметрический анализ как медленной конформационной динамики, так и быстрых переходов RyR-канала в рамках ЭК модели.
3.2 Медленная конформационная динамика RyR-канала
На первоначальном этапе с целью изучения активности одиночного RyR-
канала исследовалось влияние основных констант конформационного потенциала (2.4) и коэффициентов, входящих в уравнение Ланжевена (2.7) на характер динамики канала.
3.2.1 Параметр эффективного трения Г. Конформационная динамика RyR-канала
Коэффициент эффективного трения Г, входящий в уравнение Ланжевена
(2.7), влияет на характер изменения конформационной координаты Q со временем. Приведенное уравнение (М=1) изменения конформационной координаты при отсутствии тепловых возмущений ( temp (t) 0 ) может быть
записано в терминах затухающего гармонического осциллятора:
.. . |
|
|
Q Q 2Q 0 |
, |
(3.4) |
0 |
|
|
где 0 
 K – характерная частота колебаний гармонического осциллятора.
K – характерная частота колебаний гармонического осциллятора.
82

При малом трении (Г<2 0 ) общее решение может быть представлено в виде
[118]:
Q(t) Ae t/2 sin( |
f |
t ) , |
(3.5) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
f |
|
2 / 2 2 – частота свободных колебаний; А, φ – амплитуда и |
|||||
|
|
0 |
|
|
|
|
||
фаза затухающих колебаний, соответственно. |
|
|||||||
При Г=2 |
0 затухание называется критическим. Начиная с этого значения |
|
коэффициента |
трения, система совершает так называемое неколебательное |
|
движение. В этом случае движение происходит по закону: |
|
|
Q(t) A Bt e t/2 , |
(3.6) |
|
где А и В – константы.
Критическое затухание примечательно тем, что именно в этом случае осциллятор быстрее всего стремится к положению равновесия, причем, если коэффициент трения Г меньше критического, то он дойдет до положения равновесия быстрее, однако, при этом «проскочит» его по инерции. В этом случае осциллятор будет совершать колебания вблизи точки минимума.
При значениях Г больше критического (Г>2 0 ) решение выглядит следующим образом:
Q(t) Ae 1t Be 2t , |
|
(3.7) |
||
где |
|
/ 2 |
( / 2)2 2 |
. В этом случае осциллятор будет |
|
1,2 |
|
0 |
|
экспоненциально стремиться к положению равновесия, причем тем медленнее,
чем больше трение.
Поскольку в электронно-конформационной модели |
0 K , то |
||
критическое значение трения определяется как: |
|
||
|
|
|
|
crit 2 K . |
(3.8) |
||
Величина коэффициента Г варьировалась выше и ниже критического значения crit . При фиксированном значении параметра К=12 значение Гcrit≈6.8.
При Г< Гcrit наблюдались колебания системы вблизи минимума потенциала
83
(рис. 3.4а, колебания отмечены пунктирным прямоугольником). При Г> Гcrit
наблюдался неколебательный случай динамики RyR-канала (рис. 3.4б)
а.
|
0.3 |
|
Г=2 |
|
|
|
|
|
0.2 |
|
|
|
0.1 |
|
|
Q(t) |
0.0 |
|
Q(t) |
|
-0.1 |
|
|
|
-0.2 |
|
|
|
-0.3 |
|
|
|
-0.4 |
|
|
|
0 |
50 |
100 |
t, мс
|
б. |
|
0.2 |
|
Г=50 |
0.1 |
|
|
0.0 |
|
|
-0.1 |
|
|
-0.2 |
|
|
-0.3 |
|
|
0 |
50 |
100 |
t, мс
Рис. 3.4 Зависимости конформационной координаты Q от времени при различных значениях параметра эффективного трения Г. Параметры КП: K=12, p=-0.86, a=5.
а. Колебательное движение вблизи минимума КП. б. Режим отсутствия колебаний системы.
При проведении дальнейших численных экспериментов параметр Г
выбирался по значению больше критического (Г=7).
3.2.2 Влияние коэффициента упругости канала K на форму конформационного потенциала
Конформационный потенциал (2.4) имеет два локальных минимума со следующими конформационными координатами:
Q |
p a / 2 |
, Q |
|
|
p a / 2 |
. |
(3.9) |
|
min 2 |
|
|||||
min1 |
K |
|
|
K |
|
||
|
|
|
|
|
|||
Первый минимум соответствует закрытому, второй - открытому состоянию канала. Положение этих минимумов зависит от величины коэффициента упругости К.
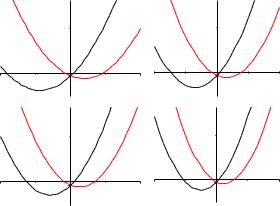
Варьируя значения К в широком интервале [1; 20] при фиксированном наборе остальных коэффициентов в (2.4), можно исследовать влияние этого параметра на свойства конформационного потенциала. Типичные графики конформационного потенциала представлены на рисунке 3.5.
84
E-(Q) |
E(Q) |
K=8 |
E-(Q) |
E(Q) |
K=10 |
Рис. |
3.5. |
Конформационный |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
потенциал |
RyR-канала |
при |
|
E+(Q) |
0 0 |
|
E+(Q) |
0 0 |
|
различных |
значениях |
||
-1 |
1 |
-1 |
|
1 |
|
|
|
||
|
|
Q |
|
|
|
Q |
|
|
|
|
|
|
|
|
|
коэффициента |
упругости |
К. |
|
E-(Q) |
E(Q) |
K=12 |
E-(Q) |
E(Q) |
K=14 |
Параметры |
потенциала: |
а=5, |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
р=-1. |
|
|
|
|
E (Q) |
|
|
|
E+(Q) |
|
|
+ |
|
|
|
0 0 |
|
-1 |
0 |
0 |
1 |
-1 |
1 |
|
|
|
|
Q |
|||
|
|
|
Q |
|
|
|
Как видно из рисунков 3.5 и 3.6, с увеличением значения коэффициента K
уменьшается расстояние между минимумами КП и крутизна ветвей КП. При изучении конформационной динамики канала исследовалось среднее время релаксации канала из точки, соответствующей одному минимуму КП в другой минимум ( trelax ).
Как показывает график, представленный на рисунке 3.7, с ростом К уменьшается значение trelax . Другими словами, варьируя параметр К, можно менять скорости конформационной релаксации канала в ЭК-модели. В
дальнейших экспериментах значение К выбиралось равным 12.
85

|
|
|
|
|
|
|
|
|
|
|
K = 8 |
|
|
|
K = 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
0.1 |
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
0.0 |
|
|
|
|
|
|
|
|
|
|
|
0.0 |
|
|
|
Q(t) |
-0.1 |
|
|
|
|
|
|
|
|
|
|
|
-0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0.2 |
|
|
|
|
|
|
|
|
|
|
|
-0.2 |
|
|
|
|
-0.3 |
|
|
|
|
|
|
|
|
|
|
|
-0.3 |
|
|
|
|
-0.4 |
|
|
|
|
|
|
|
|
|
|
|
-0.4 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
1000 |
0 |
|
|
1000 |
|
0.2 |
|
|
|
|
|
|
|
|
|
K = 12 |
0.2 |
|
|
K = 14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0.1 |
|
|
|
|
|
|
|
|
|
|
|
0.1 |
|
|
|
|
0.0 |
|
|
|
|
|
|
|
|
|
|
|
0.0 |
|
|
|
Q(t) |
-0.1 |
|
|
|
|
|
|
|
|
|
|
|
-0.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-0.2 |
|
|
|
|
|
|
|
|
|
|
|
-0.2 |
|
|
|
|
-0.3 |
|
|
|
|
|
|
|
|
|
|
|
-0.3 |
|
|
|
|
-0.4 |
|
|
|
|
|
|
|
|
|
|
|
-0.4 |
|
|
|
|
|
0 |
|
|
|
|
t |
|
|
|
|
1000 |
0 |
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
Рис. 3.6. Зависимость конформационной координаты Q от времени при |
||||||||||||||||
различных значениях константы упругости RyR-канала К. |
|
|||||||||||||||
|
12 |
|
|
|
|
|
|
|
|
|
|
|
Рис. |
3.7. |
Зависимость |
времени |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
релаксации |
канала в точку |
локального |
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
минимума |
конформационного |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
8 |
|
|
|
|
|
|
|
|
|
|
|
потенциала от коэффициента |
упругости |
||
мс |
6 |
|
|
|
|
|
|
|
|
|
|
|
канала К. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
relax |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
22 |
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
3.2.3 Зависимость конформационного потенциала от параметра |
||||||||||||||||
электронно-конформационного взаимодействия а |
|
|||||||||||||||
Выбор интервала значений параметра а, характеризующего электронно-
конформационное взаимодействие, а также изучение влияния этого параметра на форму потенциала (2.4) необходимы для успешного проведения компьютерных экспериментов.
86
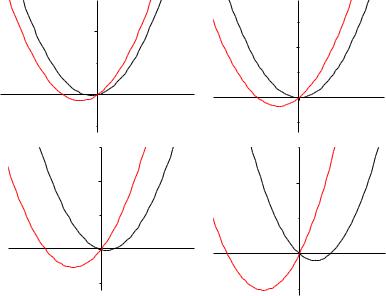
При анализе влияния параметра а на свойства КП выбирался случай при p 1, который соответствует условиям глобального минимума закрытого состояния канала. При этом значении p построены конформационные потенциалы при различных значениях параметра а и при К=12 (рис. 3.8).
E-(Q) |
E(Q) |
E (Q) |
E(Q) |
|
|
|
- |
|
|
E+(Q) |
|
|
|
|
|
|
E+(Q) |
|
|
a=1 |
0 |
|
0 |
|
Q |
|
Q |
||
a=2 |
|
|||
|
|
|||
|
|
|
|
|
E-(Q) |
E(Q) |
E-(Q) |
E(Q) |
|
|
|
|
|
|
|
E+(Q) |
E+(Q) |
|
|
|
0 |
0 |
|
|
|
|
|
Q |
a=3 |
|
Q a=5 |
Рис. 3.8. Конформационный потенциал RyR-канала при четырех различных значениях параметра электронно-конформационного взаимодействия а.
Как видно из графика, при а < 2 минимум правой ветви КП лежит левее точки пересечения ветвей КП, а это означает отсутствие локального минимума,
отвечающего за открытое состояние RyR-канала.
Необходимо оценить интервал значений параметра а, при котором наблюдается стабильность правого локального минимума потенциала. Это условие выполняется в том случае, когда минимум находится правее точки пересечения ветвей потенциала. Данная точка имеет координаты (0;0). Правый
|
|
p a / 2 |
|
p a / 2 |
|
||
минимум имеет координаты ( |
|
|
; |
E |
|
), вследствие чего должно |
|
|
|
|
|||||
|
|
K |
|
|
K |
|
|
выполняться неравенство: |
p a / 2 |
>0. |
|
|
|
|
|
|
|
|
|
|
|||
|
K |
|
|
|
|
||
Отсюда следует, что при минимальном значении параметра р=-1
безразмерный параметр а должен принимать значение больше 2. При
87
проведении численных экспериментов, приведенных в данной работе, параметр
а принимался равным 5.
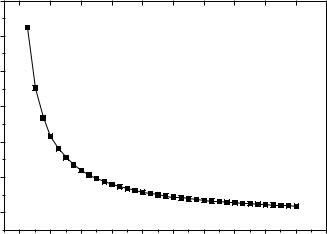
Как видно из рисунка 3.8, расстояние между минимумами КП увеличивается с ростом а, вследствие этого уменьшается время релаксации канала из одного локального минимума КП в другой (trelax) (рис. 3.9).
|
3.6 |
|
|
|
|
|
|
|
|
|
Рис. 3.9. Зависимость |
||
|
|
|
|
|
|
|
|
|
|
|
времени |
|
релаксации |
|
3.5 |
|
|
|
|
|
|
|
|
|
канала |
в |
точку |
|
|
|
|
|
|
|
|
|
|
|
локального |
минимума |
|
|
3.4 |
|
|
|
|
|
|
|
|
|
конформационного поте- |
||
мс |
|
|
|
|
|
|
|
|
|
|
нциала |
от |
параметра |
3.3 |
|
|
|
|
|
|
|
|
|
электронно-конформаци- |
|||
|
|
|
|
|
|
|
|
|
|
||||
, |
|
|
|
|
|
|
|
|
|
|
онного взаимодействия а. |
||
relax |
3.2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3.0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
22 |
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
3.3 Стохастическая динамика RyR-канала. Быстрые переходы
При проведении численных экспериментов с достаточно большой длительностью, исследуя стохастическую динамику RyR-канала, можно пренебречь медленной конформационной динамикой. Быстрые электронные и туннельные переходы можно описать в рамках традиционной марковской схемы, имеющей ряд преимуществ. Во-первых, марковские схемы обладают достаточной простотой математического аппарата; во-вторых, алгоритмы численной реализации являются быстрыми, и с помощью них можно оценить средние времена пребывания канала в открытом, закрытом и инактивационном состояниях при различных значениях интенсивностей электронных и туннельных переходов.
В связи с тем, что в ЭК-модели электронные переходы связаны с взаимодействием ионов Са2+ с активными центрами RyR-канала, можно
88
|
|
E(Q) |
|
|
|
|
|
|
I |
AI* |
|
|
A*I* |
Состояния канала в мар- |
|||
|
|
|
|
|||||
|
|
|
|
|
ковском приближении: |
|||
|
|
|
|
|
|
|
|
AI |
E+(Q) |
|
|
|
|
|
|
|
A*I |
|
|
|
E (Q) |
|
|
|
AI* |
|
|
|
|
|
- |
|
|
|
|
|
4 |
|
|
3 |
|
|
|
A*I* |
|
3 |
|
4 |
|
|
|
|
|
|
|
|
|
Интенсивности переходов: |
||||
|
1 |
|
2 |
|
|
1 |
Ʌab |
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
2 |
Ʌau |
|
|
|
|
|
A*I |
|
|
|
|
|
|
|
|
|
|
3 |
Ʌib |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
4 |
Ʌiu |
|
|
|
AI |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
Ʌtun |
|
|
|
|
|
|
|
|
|
|
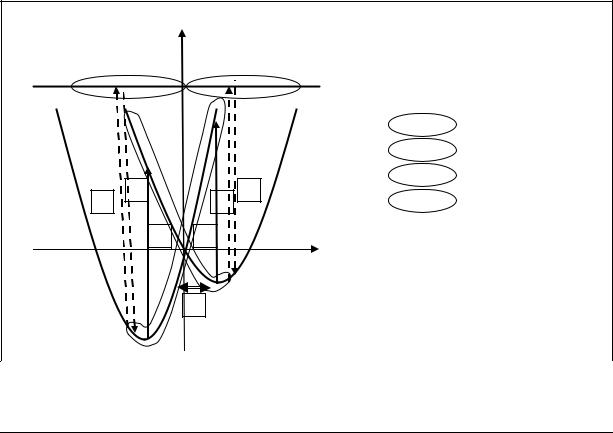
Рис. 3.10. Схема динамики RyR-канала в модифицированной электронноконформационной теории с
В связи с тем, что в ЭК-модели электронные переходы связаны с взаимодействием ионов Са2+ с активными центрами RyR-канала, можно
Как и на рисунке 2.7, введено обозначение A – активационный центр, I –
инактивационный центр канала. Знаком * обозначена связанность ионов Са2+ с
тем или иным центром, например, A*I означает то, что активационный центр канала заполнен ионами Са2+, а инактивационный – нет.
В терминах аппарата марковских цепей, были введены четыре основных состояния:
правая ветвь параболы E (Q) : AI – закрытое состояние;
левая ветвь параболы E (Q) : A*I – открытое состояние;
левая часть инактивационного уровня I: AI* – инактивационное состояние I1;
правая часть инактивационного уровня I: A*I* – инактивационное
состояние I2.
Применяя схему, представленную ранее на рисунке 2.5, и пренебрегая на
больших интервалах времени, переходные процессы:
89
AI *(I1 ) |
|
|
|
|
|
|
A*I *(I2 ) |
|
|
|
|
|
|
|
|
|
||||||||
i b i u |
|
|
|
|
|
|
|
i b |
i u , |
|
|
|
|
|
|
|
|
(3.10) |
||||||
|
|
|
|
|
a b |
|
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AI (C) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
A I (O) |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
a u tun |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где |
|
|
Pab |
, |
|
|
|
Pau |
|
, |
|
|
Pib |
, |
|
|
|
Piu |
и |
|
|
Ptun |
– интенсивности |
|
ab |
au |
|
|
ib |
iu |
tun |
|
|||||||||||||||||
|
|
dt |
|
|
dt |
|
|
dt |
|
|
dt |
|
|
dt |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
переходов. Как и на рисунке 2.7, AI соответствует закрытому (С), A*I – |
||||||||||||||||||||||||
открытому состоянию канала (О). AI* и A*I* – инактивационному состоянию ( I1 |
||||||||||||||||||||||||
и I 2 , соответственно, |
I I1 |
I2 ). |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Изменение вероятностей пребывания в различных состояниях от времени описывается с помощью системы дифференциальных уравнений (уравнения
Колмогорова):
|
dPC |
|
|
|
|
|
P P P |
|
|||
dt |
|
|
|||||||||
|
|
|
|
a u |
|
tun O i u I |
i b a b C |
|
|||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dPO |
|
|
|
a u |
tun PO i u PI2 |
a b PC i b PO |
|
||||
|
dt |
|
|
|
|
||||||
dP |
|
|
|
|
|
|
|
|
, |
(3.11) |
|
|
I1 |
|
|
|
i b PC |
i u PI |
|
|
|
||
|
|
|
|
|
|
||||||
dt |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dP |
|
|
|
|
|
|
|
|
|
|
|
|
I2 |
|
|
|
i b PO |
i u PI2 |
|
|
|
||
|
|
|
|
|
|
|
|||||
dt |
|
|
|
|
|
|
|
|
|
|
|
где P – вероятности пребывания в том или ином состоянии.
Зависимости вероятности пребывания канала в различных состояниях от времени являются решениями системы (3.11). Исследование решений системы
(3.11) позволит оценить значения вероятностей электронных и туннельных переходов RyR-канала, что необходимо для проведения численных экспериментов.
3.3.1 Кинетические характеристики динамики RyR-канала
Графики зависимости активности RyR-канала представляют собой последовательность чередующихся интервалов, указывающих на пребывание канала в открытом или закрытом состояниях (рис. 3.10). При анализе процессов открытия и закрытия RyR-канала исследовались такие кинетические
90