16
|
M 4 |
16,988 6 0,966 9 2,189 2 |
2 6 2 |
6 3 16,575 0. |
|
2 |
|||||
|
|
|
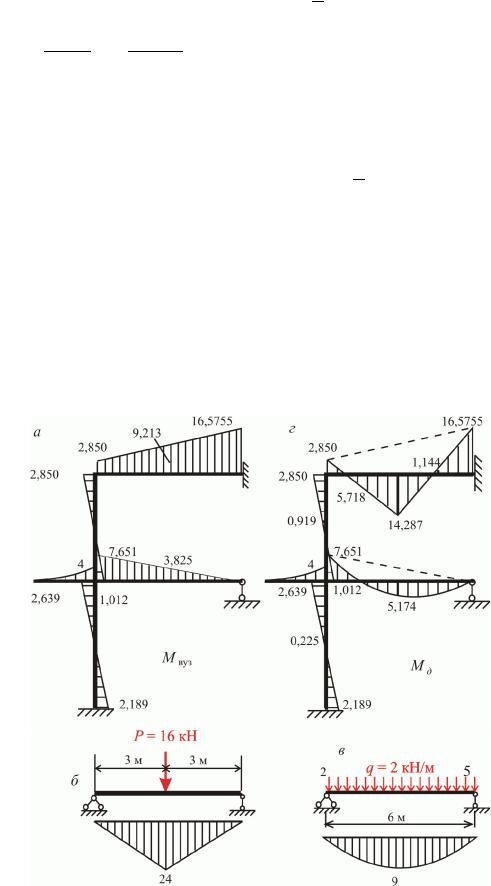
13.3. Розрахунок несиметричної рами в розгорнутій формі
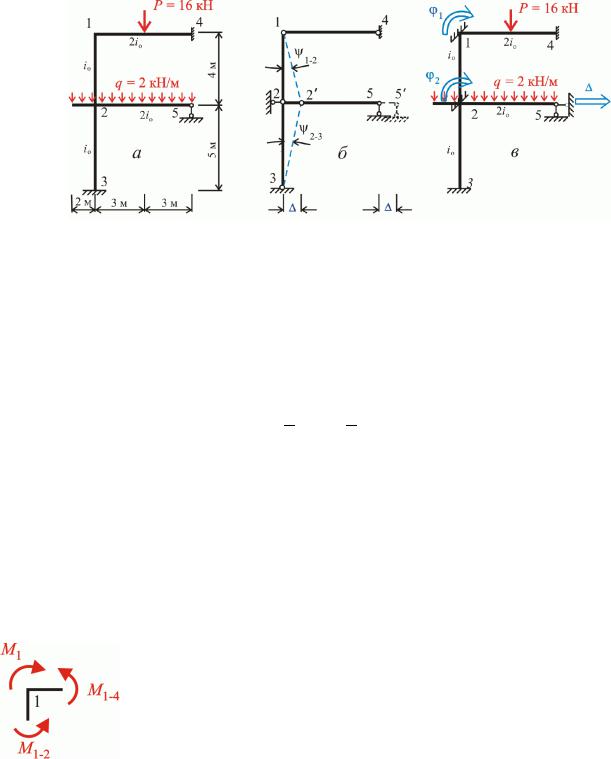
Розглянемо раму яка була розрахована в попередньому підрозділі Схема рами наведена на рис 13.12,а.
Рис 13.12
Основні невідомі і основна система методу переміщень
Основні невідомі це кути повороту проміжних жорстких вузлів 1 і 2 а також незалежне
лінійне переміщення |
Повороти затиснень в опорних вузлах |
3 |
4 0 . |
|||||||
На шарнірній схемі |
рис 13.12,б |
показано кути перекосу |
які за мализною кутів беруться |
|||||||
рівними відповідним тангенсам |
|
|
|
|
|
|
|
|
|
|
|
1 2 |
|
4 |
, |
2 3 |
5 |
, |
1 4 0, |
2 5 0. |
|
|
|
|
|
|
|
|
|
|
||
додатними вважаються кути перекосів за годинниковою стрілкою Основні невідомі методу і основна система зображено на рис 13.12,в.
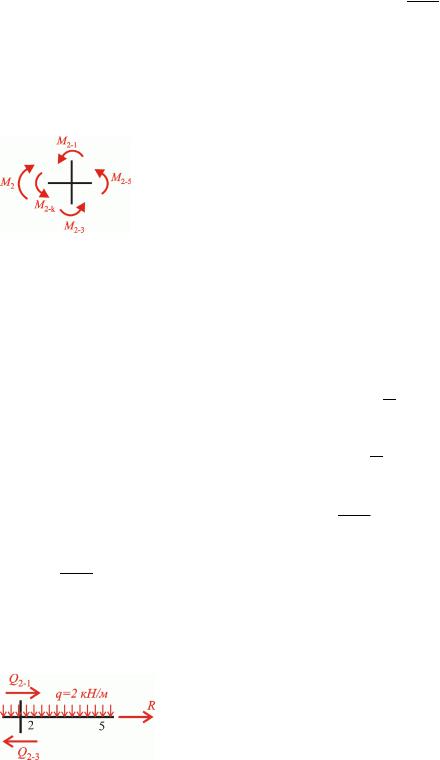
Складання розв’язувальних рівнянь
Розв’язувальні рівняння складаємо з умов рівності нулю реакцій в накладених з’єднаннях Реактивний момент пружного затиснення вузла виражається через кінцеві моменти в
стержнях з умови рівноваги вузла
M 0 |
M1 M1 2 M1 4 0. |
У свою чергу кінцеві моменти виражаються через переміщення вузлів за допомогою формул методу переміщень для зігнутих стержнів які наведено в табл 13. Оскільки стержні - і - мають на обох кінцях затиснення скористаємось з формул першого рядка табл 13.2:
|
|
|
|
|
|
|
|
|
|
|
17 |
M1 4 |
2i1 4 |
2 1 |
4 3 |
1 4 M1 4 2 2i0 2 |
1 0 0 |
16 6 8i0 |
1 12; |
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
M1 2 |
4i0 |
1 2i0 |
2 1,5i0 . |
|
|
|
|
|
|
||
M1 12i0 |
1 |
2i0 2 |
1,5i0 |
12 0. |
|
|
|
|
|
|
|
|
|
|
|
Реактивний момент |
пружного |
затиснення |
вузла |
виражається |
через |
||
|
|
|
|
кінцеві моменти в стержнях з умови рівноваги вузла |
|
|
|
||||
|
|
|
|
M2 M2 1 M2 5 M2 3 M2 к 0. |
|
|
|
|
|
||
|
|
|
|
|
Кінцеві моменти M 2 1 і M2 3 |
визначаються формулами першого рядка |
|||||
табл |
3 |
оскільки відповідні стержні мають затиснення на обох кінцях |
Момент M2 5 |
за |
|||||||
формулою з другого рядка тому що на одному кінці стержень має затиснення а на протилежному
шарнір |
о стосується моменту |
M2 к |
то він обчислюється як згинальний момент у статично |
|||||||||||||
визначуваній консольній балці Отже |
|
|
|
|
|
|
|
|
|
|||||||
M2 1 |
2i2 1 |
2 |
2 |
1 |
3 |
2 1 M2 1 |
2i0 |
2 |
2 |
1 3 |
|
4 |
0 4i0 |
2 2i0 |
1 1,5i0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 3 |
2i2 1 |
2 |
2 |
3 |
3 |
2 3 M2 3 |
2i0 |
2 |
2 0 3 |
5 |
0 4i0 2 |
1,2i0 |
; |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 5 3i2 5 |
|
2 |
2 5 M2 5 3 2i0 2 0 |
2 62 |
|
6i0 |
2 9; |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
M 2 k |
2 22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
4 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M2 2i0 1 14i0 2 |
0,3i0 |
5 0. |
|
|
|
|
|
|
|
|
|
|
||||
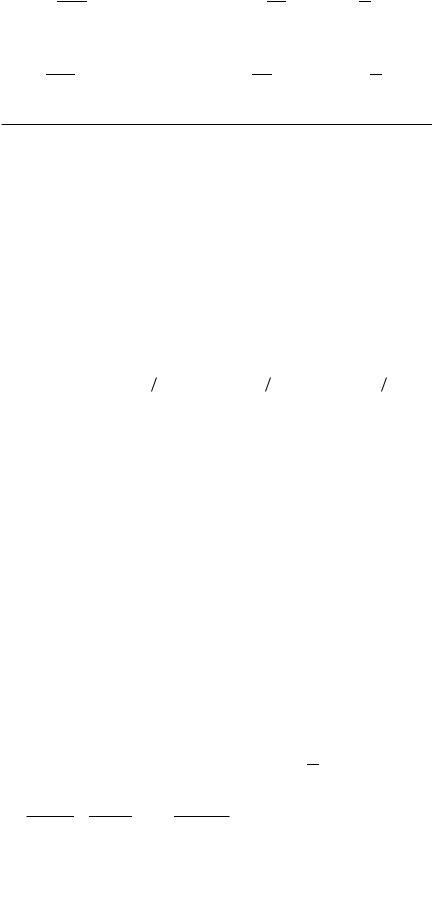
Реактивна сила в додатковому опорному стержні C1 визначається з
умови рівноваги ригеля 2-5: |
|
Fx 0 |
R Q2 3 Q2 1 0. |
18
Q2 3 |
6i2 3 2 3 2 2 3 Q2 3 6i0 |
2 |
0 2 |
5 |
|
0 |
||||||
|
l2 3 |
|
|
|
|
5 |
|
|
|
|
|
|
|
1,2i0 |
2 0,48i0 ; |
|
|
|
|
|
|
|
|
|
|
Q2 1 |
6i2 1 |
2 1 2 2 1 Q2 |
3 |
6i0 |
2 1 2 |
4 |
0 |
|||||
|
l2 1 |
|
|
|
|
4 |
|
|
|
|
|
|
|
1,5i0 |
2 1,5i0 |
1 0,75i0 . |
|
|
|
|
|
|
|
||
|
R 1,5i0 |
1 0,3i0 |
2 1,23i0 |
0. |
|
|
|
|
|
|
|
|
Отже маємо систему рівнянь |
|
|
|
|
|
|
|
|
|
|
||
|
|
12i0 |
1 |
2i0 |
2 |
1,5i0 |
|
12 |
0; |
|
||
|
|
2i0 1 |
14i0 |
2 |
0,3i0 |
|
5 |
0; |
|
|||
|
|
1,5i0 |
1 |
0,3i0 |
2 |
1,23i0 |
|
|
0, |
|
||
яка повністю збігається з системою розв’язувальних рівнянь одержаних за канонічним способом див п 13. Система має такий розв’язок
1 1,1437 i0 ; |
2 0,2248 i0 ; |
1,4496 i0 . |
Обчислення кінцевих згинальних моментів
Кінцеві згинальні моменти в стержнях рами обчислюємо за формулами табл 13.2. У вузлі
|
M1 2 2i1 2 2 1 2 3 1 2 M1 2 |
2i0 2 1 2 |
3 |
|
M1 2 |
|||||||||||||
|
4 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2i |
2 |
1,1437 |
|
0,2248 |
3 1,4496 |
0 2,850.; |
|
|
|||||||||
|
|
|
|
|
|
|||||||||||||
|
0 |
|
|
i0 |
i0 |
|
4i0 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
M1 4 2i1 4 2 1 4 3 1 4 M1 4 2 2i0 2 1 4 3 1 4 M1 4 |
|||||||||||||||||
|
4i0 |
2 |
1,1437 |
0 |
0 |
|
16 6 |
|
2,850. |
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
i0 |
|
|
8 |
|
|
|
|
|
|
|
||||
У вузлі |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 1 2i1 2 2 2 1 3 1 2 M2 1 2i0 2 2 1 3 |
4 |
M2 1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2i |
2 0,2248 1,1437 3 |
1,4496 |
0 1,012. |
|
|
|
||||||||||||
0 |
|
i0 |
|
|
i0 |
|
|
|
4i0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
M2 5 3i2 5 2 |
2 5 M2 5 3 2i0 2 |
2 5 M2 5 |
|
|
|
|
||||||||||||
6i |
0,2248 |
0 |
2 62 |
7,651. |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
0 |
i0 |
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||