

ДО ЗМІСТУ ПОСІБНИКА
9. Обчислення переміщень у стержневих системах
9.1. Короткі теоретичні відомості
9.2. Визначення переміщення в рамі
9.3. Визначення переміщення в фермі
9.4. Визначення переміщення від дії температури
9.5. Визначення переміщення від змушених переміщень опор
9.6. Задачі для самостійного розв’язування

9. Обчислення переміщень у стержневих системах
9.1. Короткі теоретичні відомості
Основним методом обчислення переміщень у стержневих системах є метод Мора що дозволяє визначати переміщення точок системи через зусилля в двох її станах Перший стан вантажний
зумовлюється |
дією заданих |
зовнішніх навантажень другий |
допоміжний |
– дією штучно |
||||||
прикладеного |
навантаження |
яке |
|
відповідає переміщенню |
Таким |
штучним |
навантаженням є |
|||
узагальнена одинична силова дія |
|
зосереджені сили моменти або система зосереджених сил чи |
||||||||
моментів які здійснюють роботу на шуканому переміщенні |
|
|
|
|
||||||
Для обчислення будь-якого переміщення за означеним методом необхідно |
|
|||||||||
Визначити зусилля M p , N p , Qp |
|
від зовнішнього навантаження |
вантажний стан p). |
|||||||
Обрати допоміжний стан |
i |
відкинувши зовнішні навантаження і приклавши одиничну |
||||||||
узагальнену силу що відповідає переміщенню |
|
|
|
|
|
|||||
Визначити зусилля Mi , Ni , |
Qi у допоміжному стані |
|
|
|
|
|||||
Обчислити переміщення за формулою Максвела-Мора |
|
|
|
|
||||||
|
ip |
|
Ni NP dx |
|
Mi MP dx |
QiQP dx , |
(9.1) |
|||
|
|
|
l |
EA |
l |
EI |
l |
GA |
|
|
|
|
|
|
|
|
|
|
|||
де сумировання ведеться по всім стержням системи Тут позначено |
ip – переміщення в напрямі |
|||||||||
узагальненої одиничної сили допоміжного стану i від навантаження стану p; EA, EI, GA –
жорсткості елементів відповідно на поздовжні деформації на деформації згину і на зсув – коефіцієнт форми перерізу
Величини кожного з трьох доданків у формулі Максвела-Мора характеризують внесок того чи іншого виду внутрішніх зусиль у переміщення що розшукується Для різного виду конструкцій нехтування деякими видами зусиль мало позначається на величині переміщення Так для балок і
рам деформування яких відбувається переважно за рахунок згину |
можна знехтувати впливом |
|
поздовжніх і поперечних сил У такому разі інтеграл Мора матиме вигляд |
||
ip |
Mi MP dx . |
(9.2) |
l |
EI |
|
|
|
|
Для ферм в стержнях яких існують переважно поздовжні деформації можна записати |
||
ip Ni NP l. |
(9.3) |
|
|
EA |
|
|
|
|
|
|
2 |
Для арок |
|
|
|
|
|
ip |
|
Ni NP dx |
|
Mi M P dx. |
(9.4) |
|
l |
EA |
l |
EI |
|
нтеграл Мора може бути обчислений або безпосереднім інтегруванням або за допомогою
прийомів чисельного інтегрування |
Процедуру обчислення інтеграла Мора називають множенням |
||
епюр В практичних задачах як |
правило |
використовують правило |
ерещагіна і формулу |
Сімпсона-Корноухова. |
|
|
|
|
|
l |
|
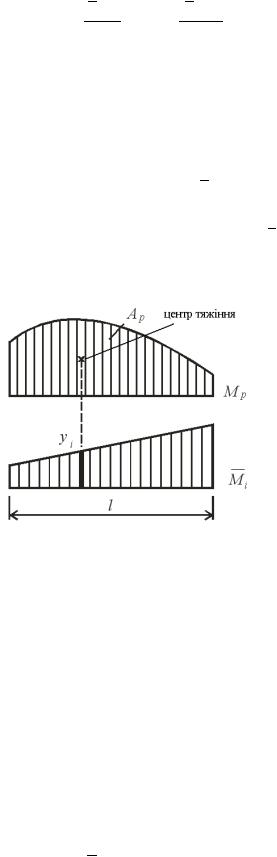
За правилом Верещагіна для обчислення |
інтеграла Mi M pdx достатньо помножити площу |
||
|
|
0 |
|
епюри вантажного стану M p на ординату епюри допоміжного сануMi |
що береться під центром |
||
тяжіння епюри M p рис 9.1): |
|
|
|
Рис 9.1
l |
|
Mi M pdx Ap yi . |
(9.5) |
0 |
|
кщо ордината yi і площа Ap розташовані по один і той самий бік стержня добуток береться зі |
|
знаком плюс |
|
При застосування правила Верещагіна необхідно звернути увагу на те |
що принаймні одна з |
перемножуваних епюр має бути прямолінійною Крім того ордината yi |
повинна бути взята на |
прямолінійній епюрі |
|
За правилом Сімпсона–Корноухова інтеграл Мора обчислюється через добутки відповідних
ординат епюр на кінцях і всередині ділянки інтегрування |
рис 9.2): |
|
|||||||||
l |
|
|
dx l |
|
|
|
|
|
|
|
|
M |
M |
p |
(a a |
p |
4c c |
p |
b b |
p |
). |
(9.6) |
|
i |
|
6 |
i |
i |
i |
|
|
||||
0 |
|
|
|
|
|
|
|
|
|
|
|

3
Рис 9.2
ормулу Сімпсона–Корноухова можна використовувати якщо обидві епюри не мають зламів
розривів і точок перегину |
кщо такі точки існують |
інтервал інтегрування треба розкласти на |
||||||
окремі підінтервали |
|
|
|
|
|
|
|
|
ормула Мора у вигляді 9. |
непридатна для обчислення температурних переміщень і виникає |
|||||||
потреба мати ще один варіант формули призначений для розрахунків на дію температури |
кщо |
|||||||
елементи системи мають симетричні перерізи можна використовувати формулу |
|
|
||||||
|
|
it |
t1 t2 |
AMi |
t t |
2 ANi . |
|
(9.7) |
|
|
h |
1 |
|
||||
|
|
|
|
2 |
|
|
|
|
Тут – коефіцієнт лінійного розширення матеріалу |
для бетону і для сталі |
1,2 10 5 гра |
1 ); |
|||||
h – висота поперечного |
перерізу елемента AMi , ANi |
– площі епюр згинальних моментів і |
||||||
поздовжніх сил у допоміжному стані t1 |
і t2 – температура з двох боків елемента |
|
|
|||||
Перший доданок формули |
9. |
характеризує внесок |
в повне переміщення згинальних |
|||||
моментів Він береться зі знаком плюс |
якщо розтягнені волокна на стержні в допоміжному стані |
|||||||
збігаються з розтягненими волокнами від дії температури Другий доданок характеризує внесок
поздовжніх сил |
ого знак залежить від знаків епюри поздовжніх сил допоміжного стану |
||
кщо опори |
споруди зміщуються |
то в статично визначуваних системах опорні реакції |
|
внутрішні зусилля і деформації елементів дорівнюють нулю |
Проте точки споруди одержують |
||
переміщення Зазначені переміщення |
можна обчислити як |
від’ємну суму добутків опорних |
|
реакцій допоміжного стану на відповідні вимушені зміщення опор |
|||
|
|
ic Rjicj . |
(9.8) |
У цьому виразі Rji опорна реакція Rj допоміжного стану i, |
cj відповідне вимушене зміщення |
||
опори у стані C. |
|
|
|
4
9.2. изначення переміщення в рамі
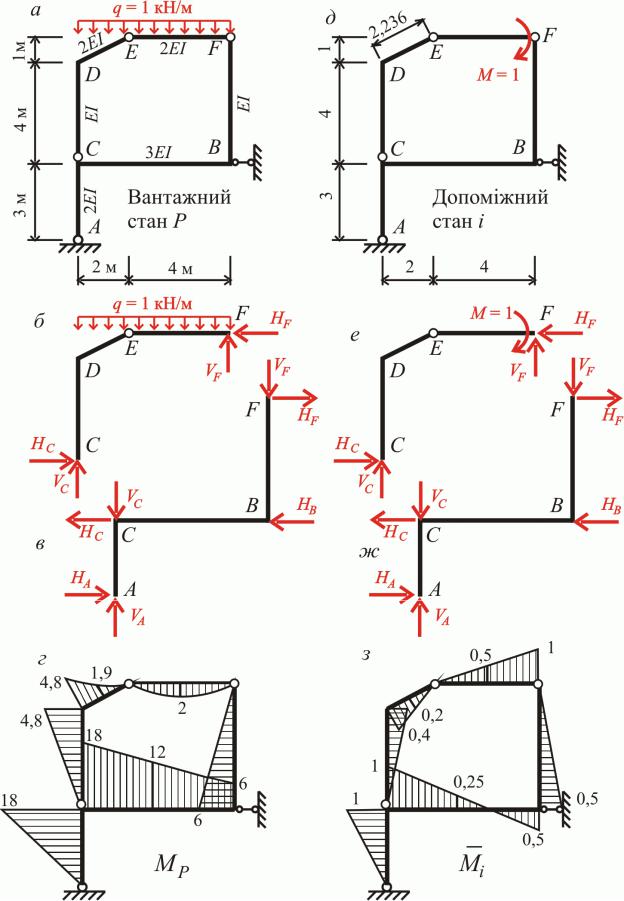
Визначити кут повороту стержня EF в шарнірі F рами від заданого навантаження рис 9.3,а).
Кінематичний аналіз рами
Рама складається з чотирьох дисків ACBF, CDE, EF і земля які з’єднуються між собою
чотирма простими |
шарнірами A, C, E i F і кінематичною в’яззю у вузлі B Таким чином D = 4, |
= 4, = 1, П = 0, В |
За формулою ебишова (2.1) |
|
3 4 2 0 3 0 2 4 1 3 0 . |
Аналізуємо геометричну структуру рами
1. |
|
DACBF D"земля" |
|||
|
|
|
|
I ; |
|
|
A ,CB |
|
|||
|
|
DCDE DEF |
|
I |
|
2. |
|
|
|
|
II . |
|
A, E , |
|
|
||
|
|
F |
|||
Отже рама має два поверхи і є геометрично незмінюваною та статично визначуваною
Статичний розрахунок рами у вантажному стані
Визначаємо опорні реакції другого поверху рис 9.3,б):
|
рав |
0 |
V |
|
4 1 4 2 0 |
|
|
2 кН; |
|
M |
F |
V |
F |
||||||
|
E |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
M C 0 |
H F 5 1 6 3 2 6 0 |
|
|
H F 1,2 кН; |
|||||
|
|
|
|
|
|
|
|
|
|
Fx 0 |
|
HC 1,2 0 |
HC 0; |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Fy 0 |
|
VC 1 6 2 0 |
VC 4 кН. |
|
|||||
Визначаємо опорні реакції першого поверху рис 9.3,в):
M A 0 |
H B 3 2 6 1,2 8 1,2 3 0 |
H B 6 кН; |
||
|
|
|
|
|
Fy 0 |
VA 4 2 0 |
VA 6 кН; |
|
|
|
|
|
|
|
Fx 0 |
H A 1,2 1,2 6 0 |
H A 6 кН. |
|
|
Епюру згинальних моментів M P у вантажному стані побудовано на рис 9.3,г.
5
Рис 9.3
6
ризначення допоміжного стану
Для визначення кута повороту стержня EF у шарнірі F відкидаємо задане навантаження і прикладаємо до стержня EF у зазначеному шарнірі зосереджений момент що дорівнює одиниці рис 9.3, ).
Статичний розрахунок рами в допоміжному стані
Визначаємо опорні реакції другого поверху рис 9.3,е):
|
рав |
0 |
V |
|
4 1 0 |
|
|
0,25 м 1 ; |
|
|
M |
F |
V |
F |
|
||||||
|
E |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
H F 0,1 м 1 ; |
||
M C 0 |
H F 5 1 0,25 6 0 |
|
|
|||||||
|
|
|
|
|
|
HC 0,1 м 1 ; |
|
|||
Fx 0 |
|
HC 0,1 0 |
|
|||||||
|
|
|
|
|
|
VC 0,25 м 1. |
|
|||
Fy 0 |
|
VC 0,25 0 |
|
|||||||
Опорні реакції першого поверху |
рис 9.3, |
): |
|
|||||||
M A 0 |
H B 3 0,25 6 0,1 8 0,1 3 0 |
H B 0,333 м 1 ; |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Fy 0 |
|
VA 0,25 0,25 0 |
VA 0; |
|
||||||
|
|
|
|
|
|
|
|
|
H A 0,333 м 1. |
|
Fx 0 |
|
H A 0,1 0,1 0,333 0 |
|
|
||||||
Епюру згинальних моментів Mi у допоміжному стані побудовано на рис 9.3, .
Обчислення переміщення кут повороту ригеля EF в шарнірі F)
ip |
|
Mi MP dx C Mi MP dx D Mi MP dx F Mi MP |
dx B Mi MP dx |
||||||||||||
|
l |
|
EI |
|
A |
EI |
C |
EI |
B |
EI |
|
C |
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
E Mi M P |
dx F |
Mi M P dx |
1 |
1 18 3 2 |
1 1 |
|
1 4,8 4 |
2 0,4 |
|||||||
|
D |
|
EI |
E |
|
EI |
2EI |
2 |
3 |
EI |
|
2 |
|
|
3 |
|
1 |
|
1 |
2 |
|
6 |
18 1 4 12 0,25 6 0,5 |
|
|
|
|||||
|
EI |
2 6 |
5 3 0,5 6 3EI |
|
|
|
|||||||||
|
2, |
236 |
|
|
|
|
4 |
|
|
|
|
|
8, 466 |
||
|
6 |
2EI 4,8 0,4 4 1,9 0,2 |
6 2EI |
0 4 0,5 |
|
2 0 |
|
|
EI . |
||||||
7
9.3. изначення переміщення в фермі
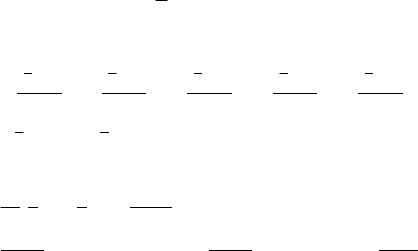
Визначити прогин вузла ферми представленої на рис 9.4,а.
|
|
Рис 9.4 |
|
Кінематичний аналіз ферми |
|
|
|
Задана ферма містить вузлів і |
стержнів разом зі стержнями опор |
Ступінь геометричної |
|
змінюваності |
|
|
|
|
|
2 8 16 0 . |
|
ерма утворена за способом |
діад |
Дійсно якщо прийняти будь-який стержень за основу то |
|
можна утворити диск ферми |
шляхом послідовного приєднання вузлів |
за допомогою двох |
|

8
стержнів Утворений диск ферми приєднується до диску земля трьома опорними в’язями яки всі три водночас не паралельні між собою і не перетинаються в одній точці Отже ферма статично визначувана і геометрично незмінювана
Статичний розрахунок ферми у вантажному стані
Визначаємо опорні реакції рис 9. б
Fx 0 |
H A 0; |
|
|
|
|
M B 0 |
VA 16 12 12 12 4 0 |
VA 12 кН; |
|
|
|
M A 0 |
VB 16 12 12 12 4 0 |
VB 12 кН. |
Зусилля в стержнях можна визначити будь-яким способом вирізанням вузлів способом наскрізних перерізів способом сумісних перерізів або будь-яким сполученням згаданих способів Величини зусиль показано на стержнях ферми
ризначення допоміжного стану
Допоміжний стан ферми представлено на рис 9. в Тут відкинуто задані навантаження а у вузлі прикладено вертикальну одиничну силу P=1.
Статичний розрахунок ферми в допоміжному стані
Опорні реакції і зусилля в допоміжному стані ферми показано на рис 9. г
Обчислення переміщення
Переміщення визначаємо за формулою 9.3):
ip NEAi NP l.
Довжини стержнів визначаються з геометричної схеми ферми рис 9. г Тут також наведено жорсткості стержнів ферми на поздовжні деформації Обчислення виконуються в таблиці 9.1.
укане переміщення прогин вузла визначається сумою елементів шостого стовпця таблиці
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
Таблиця 9.1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ст |
l (м) |
EA |
Np (кН) |
|
Ni |
|
Ni N p |
|
l |
|
|
|
|
||
|
|
|
EA |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
3 |
|
4 |
|
5 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
A-1 |
5.000 |
2.000 |
-20.000 |
|
-0.833 |
41.650 |
|
|
|
|
|||||
|
1-2 |
4.000 |
2.000 |
-16.000 |
|
-1.333 |
42.656 |
|
|
|
|
|||||
|
2-3 |
4.000 |
2.000 |
-16.000 |
|
-1.333 |
42.656 |
|
|
|
|
|||||
|
3-B |
5.000 |
2.000 |
-20.000 |
|
-0.833 |
41.650 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
A-4 |
4.000 |
1.000 |
16.000 |
|
0.667 |
42.688 |
|
|
|
|
|||||
|
4-5 |
4.000 |
1.000 |
16.000 |
|
0.667 |
42.688 |
|
|
|
|
|||||
|
5-6 |
4.000 |
1.000 |
16.000 |
|
0.667 |
42.688 |
|
|
|
|
|||||
|
6-B |
4.000 |
1.000 |
16.000 |
|
0.667 |
42.688 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1-4 |
3.000 |
1.000 |
0.000 |
|
0.000 |
0.000 |
|
|
|
|
|
||||
|
2-5 |
3.000 |
1.000 |
0.000 |
|
0.000 |
0.000 |
|
|
|
|
|
||||
|
3-6 |
3.000 |
1.000 |
1.000 |
|
0.000 |
0.000 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
4-5 |
5.000 |
1.000 |
0.000 |
|
0.833 |
0.000 |
|
|
|
|
|
||||
|
3-5 |
5.000 |
1.000 |
0.000 |
|
0.833 |
0.000 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Усього |
|
339,364 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отже шукане переміщення |
ip |
339,364 |
. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
EA |
|
|
|
|
|
|
|
|
|
|
|
|
9.4. изначення переміщення від дії температури |
|
|
|
|
|
|
|
|
||||||||
Визначити горизонтальне переміщення опори C |
рами |
|
рис 9. |
|
а |
що |
спричиняється |
|||||||||
представленим на рисунку температурним |
полем Всі стержні мають |
прямокутний переріз |
||||||||||||||
рис 9. б Коефіцієнт лінійного розширення матеріалу |
1,2 10 5 гра |
|
1 . |
|
|
|||||||||||
Кінематичний аналіз рами
Рама являє собою ламаний стержень ABC, який приєднується до основи трьома шарнірно-
рухомим опорами |
Таким чином можна вважати що рама має два диска і три кінематичні в’язі |
тобто D = 2, C = 3, |
= 0, П = 0, В = За формулою ебишова (2.1) |
|
3 2 2 0 3 0 2 0 3 3 0. |
Структурно рама утворена з’єднанням двох дисків трьома кінематичними в’язями
10
DABC D"земля" |
. |
|
CA,CB ,CC |
||
|
Таким чином рама геометрично незмінювана і статично визначувана
Рис 9.5
|
|
|
|
|
|
|
|
|
|
|
11 |
ризначення допоміжного стану |
|
|
|
|
|
||||||
Допоміжний |
стан |
для |
визначення горизонтального |
переміщення опори |
утворюється |
||||||
прикладенням в опорі |
горизонтальної безрозмірної сили яка дорівнює одиниці |
рис 9. в |
|||||||||
Статичний розрахунок рами в допоміжному стані |
|
|
|||||||||
Реакції опор в допоміжному стані показано на рис 9. |
г Для їх обчислення складаються і |
||||||||||
розв’язуються рівняння рівноваги |
|
|
|
|
|
||||||
M A 0 |
VC 10 1 3 0 |
VC 0,3; |
|
|
|||||||
|
0 |
HB 1 0 |
|
|
|
1; |
|
|
|||
Fx |
|
HB |
|
|
|||||||
|
0 |
VA 0,3 0 |
|
|
|
0,3. |
|
|
|||
Fy |
|
VA |
|
|
|||||||
Епюра згинальних моментів |
|
i |
і поздовжніх сил |
|
|
у допоміжному стані побудовано на |
|||||
M |
Ni |
||||||||||
рис 9. д і 9. е відповідно |
|
|
|
|
|
|
|
|
|||
Обчислення переміщення
Обчислення виконуємо за формулою 9.7):
it |
|
1 |
1,8м 6м |
|
50 200 |
|
|
1 |
1,2м 4м |
|
50 100 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
2 |
|
0,4м |
2 |
|
|
|
0,4м |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
1 |
|
|
|
|
200 100 |
|
|
|
0,3 3м |
0 |
0 |
20 |
0 |
|
1 4м |
5 |
0 |
10 |
0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
3 |
м 3м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
2 |
|
|
0,2м |
|
|
|
|
2 |
|
|
|
2 |
|
|
||||||||||||
|
453,5 |
|
гра |
|
453,5 1,2 10 5 |
м 0,5442 |
10 2 м. |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
м |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
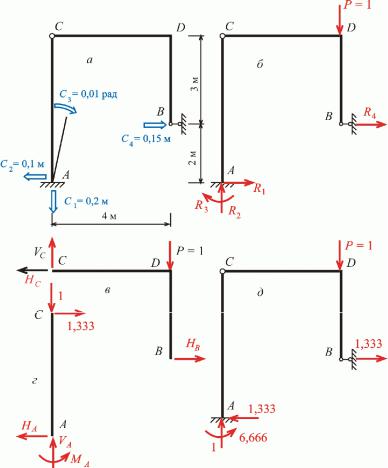
9. . изначення переміщення від змушених переміщень опор
Визначити вертикальне переміщення вузла D рами рис 9. а), яке визначається змушеними переміщеннями опор Переміщення показано на рисунку подвійними стрілками
Кінематичний аналіз
Рама складається з двох дисків і основи які поєднуються за допомогою припайки в опорі А,
шарніру у вузлі |
та кінематичної в’язі у шарнірно нерухомій опорі В Отже рама має таку |
||
кількість елементів |
D = 3, В = 0, П = 1, |
= 1, |
Ступінь геометричної змінюваності |
3 3 2 0 3 1 2 1 1 3 0.
12
Рис 9.6
Схема рами утворюється за два кроки
1. |
DAC D"земля |
I ; |
||
ПA |
||||
|
|
|||
2. |
I DCDB |
II. |
||
|
||||
|
C ,CB |
|
||
Таким чином рама геометрично незмінювана і статично визначувана
ризначення допоміжного стану
Для визначення вертикального переміщення вузла D прикладаємо до нього вертикальну силу яка дорівнює одиниці рис 9. б Тут також позначено ті реакції опор які відповідають змушеним переміщенням
13
Статичний розрахунок рами в допоміжному стані
Визначаємо опорні реакції другого поверху рис 9. в .
Fy 0 |
VC 1 0 |
VC 1; |
|
|
|
|
|
MC 0 |
HB 3 1 4 0 |
HB 1,333; |
|
|
|
|
|
Fx 0 |
HC 1,333 0 |
|
HC 1,333. |
Опорні реакції першого поверху рис 9. г . |
|||
Fx 0 |
H A 1,333 0 |
|
H A 1,333; |
|
|
|
|
Fy 0 |
VA 1 0 |
VA 1; |
|
|
|
|
|
M A 0 |
M A 1,333 5 0 |
M A 6,666. |
|
Обчислення переміщення
укане переміщення визначаємо за формулою 9.8):
ic Rjicj 1,333 0,1м 0,1 0,2 м 6,666 м 0,01 1,333 0,15 м 0,353 м.