

16
M O 2H A 3VB 2H B 2HC 6VC
2 3,50 3 6,57 2 2,24 2 5,18 6 2,24 24,08 24,08 0.
Відповідь епюри внутрішніх зусиль для статично невизначуваної рами зображені на рис 10.15,
г та рис 10.19,а в.
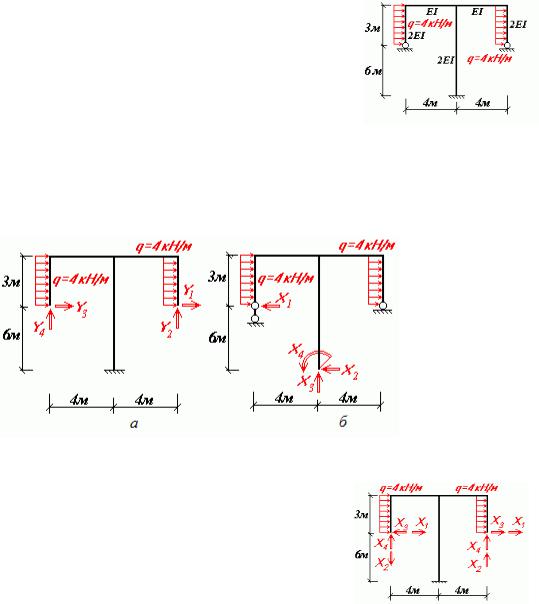
10.3. Розрахунок симетричної рами методом сил
Дано розрахункова модель рис 10.20). Необхідно побудувати епюри внутрішніх зусиль.
озв’язування:
1)Ступінь статичної невизначуваності рами n 3K 3 2 2 4 .
Отже рама чотири рази статично невизначувана Структура плоскої рами – стержневий розгалужений диск приєднаний до опорної поверхні двома простими шарнірами та припайкою свідчить про її гео метричну незмінюваність
2) Для розв’язку задачі методом сил можна використати одну із основних систем запропоно ваних на рис 10.21.
Рис.1 .21
Розглянемо приклад розв’язку за першим варіантом основної системи рис 10.21,а Враховуючи симетрію геометрії та жорстко стей стержнів розрахункової схеми виконується заміна невідомих загального вигляду Y1, Y2, Y3, Y4 прикладених до симетричних точок
на попарно симетричні та кососиметричні невідомі X1, X2, X3, X4
Рис 10.22
рис 10.22 Нові невідомі мають задовольняти наступні рівняння
17
X1 X3 Y1 , |
X4 X2 Y2 , |
X1 X3 Y3 , |
X4 X2 Y4 . |
3) Система канонічних рівнянь для чотири рази статично невизначуваної рами має вигляд
11 X1 12 X2 13 X3 14 X4 1P 0; 21 X1 22 X2 23 X3 24 X4 2P 0;
31 X1 |
32 X2 |
33 X3 34 X4 3P 0; |
41 X1 |
42 X2 |
43 X3 44 X4 4P 0. |
Від симетричного одиничного навантаження в третьому та четвертому одиничних станах епю ри згинальних моментів будуть симетричними астина коефіцієнтів системи рівнянь які обчислені множенням симетричних епюр на кососиметричні дорівнюватимуть нулю тому систе ма канонічних рівнянь набуде вигляду
11 X1 12 X2 0 X3 0 X4 1P 21 X1 22 X2 0 X3 0 X4 2P
0;
0;
0 X1 0 X2 |
33 X3 |
34 X4 0 0; |
0 X1 0 X2 |
43 X3 |
44 X4 0 0; |
і може бути розділена на дві підсистеми
11 X1 |
12 X2 |
1P |
21 X1 |
22 X2 |
2P |
0; |
33 X3 |
|
34 X4 |
0; |
0; |
43 X3 |
|
44 X4 |
0. |
Друга підсистема є однорідною і має тривіальний розв’язок тому для побудови
епюр дійсних зусиль в статично невизначуваній рамі залишається відшукати корені лише першої підсистеми
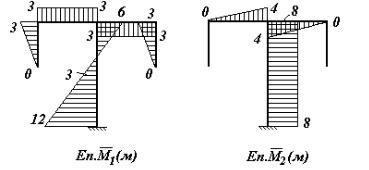
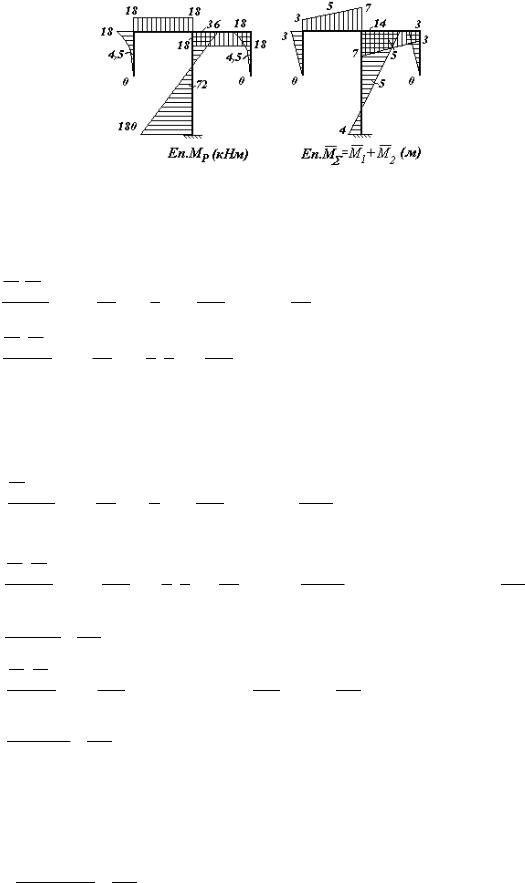
4) Для визначення коефіцієнтів та вільних членів системи канонічних рівнянь будуються епю ри згинальних моментів для одиничних та вантажного станів рис 10.23).
Обчислення коефіцієнтів та вільних членів системи рівнянь
а |
б |
18
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис 10.23 |
|
|
|
|
|
|
|||||
11 |
|
M 1 M 1 |
|
|
|
|
|
1 |
|
|
|
1 |
2 |
|
1 |
|
|
|
|
|
9 |
62 4 32 122 |
243 |
|
|
|
||||||||||||||
|
|
|
|
|
EI |
dx |
2 |
|
2EI 3 3 2 |
3 3 EI 3 4 3 |
6 2EI |
EI |
; |
|
|
|||||||||||||||||||||||||
12 |
|
M 1 M 2 dx 2 |
|
1 |
4 |
|
4 1 |
3 |
|
1 |
8 |
9 3 |
60 ; |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
EI |
|
|
|
2 |
|
|
2EI |
|
|
|
|
|
|
EI |
|
|
|
|
|
|
||||
22 |
|
M 2 M 2 dx 2 |
|
1 |
4 4 1 2 |
4 |
1 |
8 9 8 331; |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
EI |
|
|
|
2 |
3 |
|
|
2EI |
|
|
|
|
|
EI |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
1МP dx |
|
|
3 |
|
|
|
|
3 |
1 |
18 4 3 |
|
|
|
|
|
|
|||||||||||||||||
1P |
|
M |
2 |
|
|
|
0 4 4,5 1,5 18 |
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
6 2EI |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
||||||||||
|
|
|
9 |
|
|
|
|
180 12 4 72 3 36 6 2903; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
6 2EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2P |
|
|
M 2M P dx 2 |
1 |
4 4 1 |
18 |
|
1 |
8 9 72 2304 . |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
EI |
|
|
|
2 |
|
|
2EI |
|
|
|
|
|
|
EI |
|
|
|
|
|
|
||
|
|
Перевірка отриманих коефіцієнтів та вільних членів |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
1 |
|
M M 1 |
|
|
|
|
1 |
|
|
|
|
1 |
2 |
|
|
1 |
|
|
|
|
|
9 |
|
|
|
|
183 |
|
||||||||||||
|
|
|
|
|
EI |
|
dx 2 |
2EI |
3 3 |
2 |
3 3 |
EI |
3 4 5 6 2EI 6 14 4 3 5 12 4 |
|
EI |
; |
||||||||||||||||||||||||
11 |
|
12 |
243 60 |
183 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
EI |
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
2 |
|
|
M M 2 |
|
|
|
4 |
0 4 2 5 7 4 |
1 |
|
|
|
|
271 |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
EI |
|
|
dx 2 |
6EI |
2EI |
8 |
9 5 |
EI |
; |
|
|
|
|
||||||||||||||||||||
12 |
|
|
22 |
60 331 271; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
M P dx 2 |
|
3 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||||||||||||||||
P |
|
|
M |
|
|
|
|
0 |
4 4,5 1,5 18 3 |
|
|
18 4 5 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
6 2EI |
|
EI |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
9 |
|
|
|
|
180 4 4 72 5 36 14 599 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
6 2EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
1P |
|
|
2P |
2903 2304 |
599 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
EI |
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
19
5) Після підстановки коефіцієнтів та вільних членів система канонічних рівнянь набуває ви гляду
243 |
X1 |
60 |
X2 |
|
2903 |
0; |
|
|
EI |
EI |
|
||||
EI |
|
|
|
||||
EI60 X1 331EI X2 2304EI 0.
Помноживши ліву і праву частини обох рівнянь на EI, маємо
243X1 60X2 2903;60X1 331X2 2304.
Розв’язком системи рівнянь є
X1 10,707 |
10,70; |
X2 5,020. |
Перевірка правильності розв’язування системи рівнянь підстановкою коренів у сумарне рівняння
(243 60) ( 10,707) ( 60 331) 5,02 595;2903 2304 599.
Відносна похибка визначення коренів системи рівнянь
599 595 100% 0,7%. 595
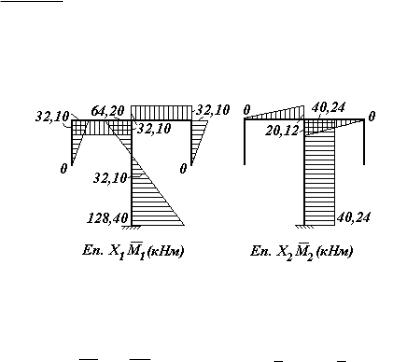
6) Побудова парціальних епюр згинальних моментів рис 10.24)
а |
б |
Рис 10.24
Ординати дійсної епюри згинальних моментів рис 10.25,а визначаються за формулою
M M1 X1 M2 X2 M 10,70М1 5,02М2 М .
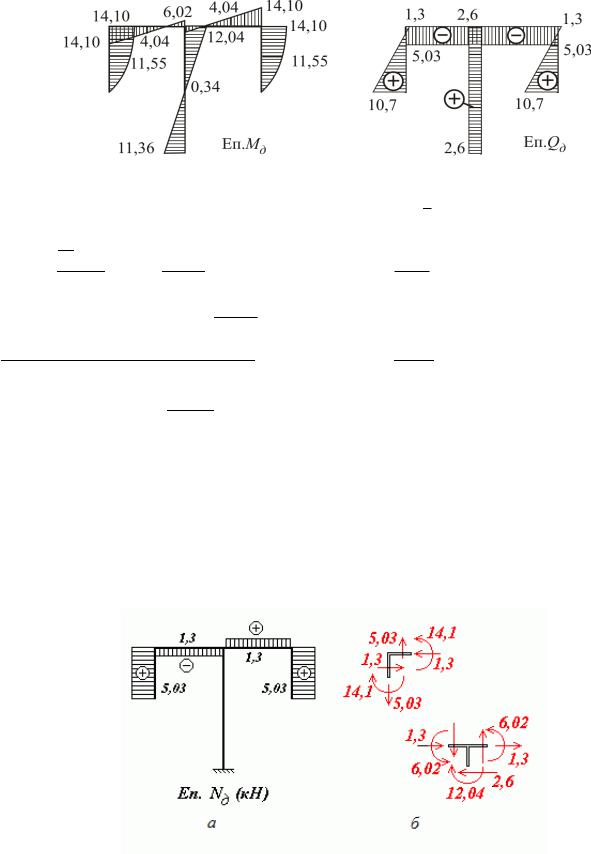
20
|
|
|
|
Рис 10.25 |
|
|
|
|
7) Кінематична перевірка |
за контрольну прийнято епюру М |
рис 10.23,г) |
||||
|
P |
M M |
3 |
|
|
4 |
|
|
EI P dx 2 |
6 2EI 0 4 11,55 1,5 14,10 3 |
6 EI |
|
|||
3 14,10 4 5 4,04 7 6,03 |
6 29EI 11,36 4 4 0,34 5 |
14 12,04 |
|||||
|
55,80 164,13 56,28 160,50 5,10 216,78 225,03 |
|
8,25 . |
||||
|
|
EI |
|
EI |
|
EI |
|
Відносна похибка 216,788,25 100% 3,8%.
8) Епюра дійсних поперечних сил рис 10.25,б будується по епюрі дійсних згинальних моментів з використанням диференційної залежності між ними
Q x dM x  d x .
d x .
9) Значення поздовжньої сили рис 10.26,а в перерізах рами визначаємо з умов рівноваги вуз лів рис 10.26,б)
Рис 10.26
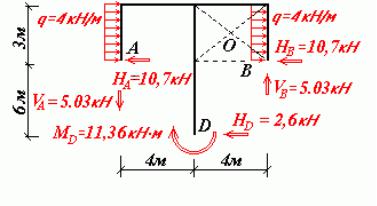
21
10) Перевірка рівноваги рами в цілому рис 10.27)
Рис 10.27
MO 6VA 2VB M D 1,5(H A HB ) 7,5HD
6 5,03 2 5,03 11,36 1,5 (10,7 10,7) 7,7 2,6
51,6 51,6 0.
Перевірка задовільна