

|
7 |
відповідних кінцях стержня і з’єднуються прямими лініями |
тобто будується епюра вузлових |
моментів Mву У межах стержнів до яких прикладені зовнішні навантаження від епюри вузлових |
|
моментів відкладаються епюри балкових моментів Mбал |
побудовані від зовнішнього |
навантаження в стержнях як в простих статично визначуваних балках на двох шарнірних опорах
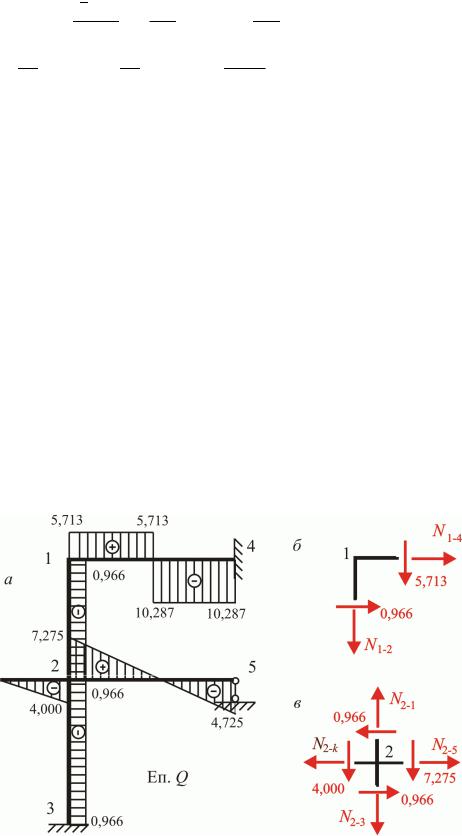
Епюра поперечних сил будується на базі диференціальної залежності |
|
Q dM . |
(13.4) |
ds |
|
При застосуванні розгорнутого способу дійсні поперечні сили можуть також бути обчислені за
формулами для кінцевих зусиль |
див табл 13. Поздовжні сили визначаються з умов рівноваги |
|
вузлів або |
окремих частин рами до яких прикладаються задані зовнішні навантаження а в |
|
перерізах |
поперечні сили |
що беруться з епюри Q і поздовжні сили Вузли необхідно |
розглядати в такій послідовності щоб у кожному з них було не більше двох невідомих поздовжніх сил
13.2.Розрахунок несиметричної рами в канонічній формі
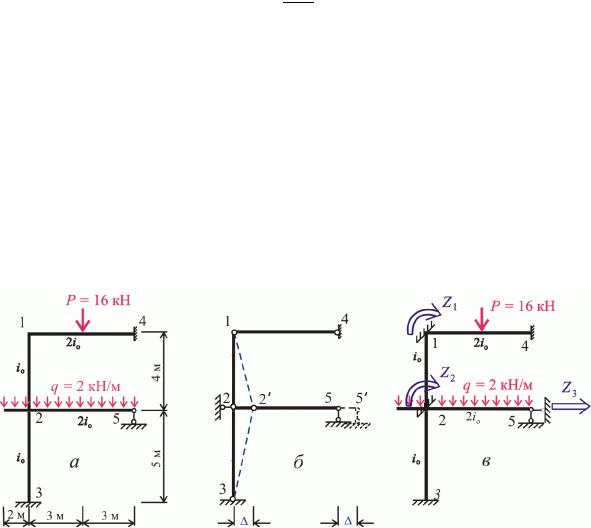
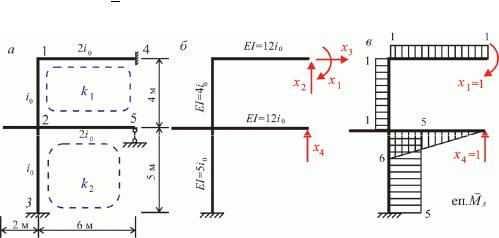
Виконаємо розрахунок статично невизначуваної рами рис 13.3,а).
Рис 13.3
творення основної системи методу переміщень
Вихідна рама має два проміжних жорстких вузли в які необхідно ввести рухомі затиснення Для визначення кількості незалежних лінійних переміщень створено шарнірну схему рами рис 13.3,б Для того щоб вона була геометрично незмінюваною достатньо ввести додатковий опорний стержень C1 який закріплює ригель - від можливих горизонтальних переміщень Основна система методу переміщень зображена на рис 13.3,в.
9
Рис 13.5
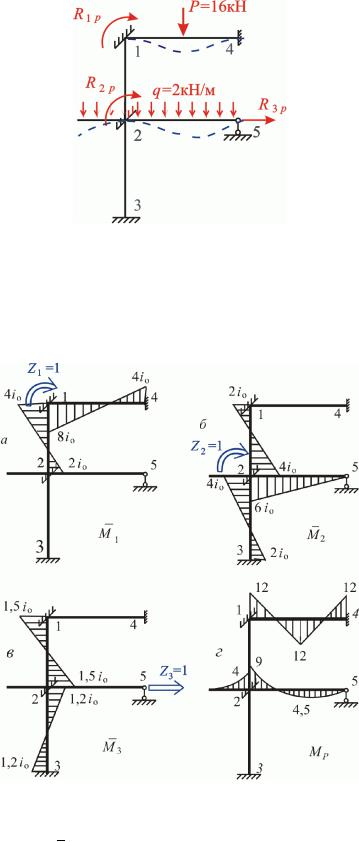
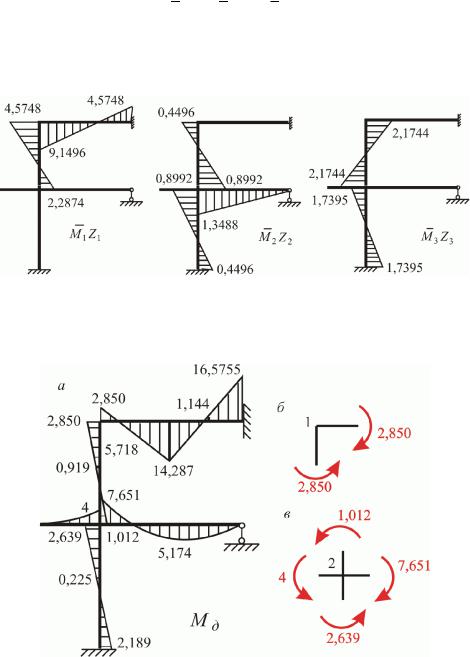
обудова одиничних і вантажної епюр
Одиничні і вантажні епюри побудовано на рис 13. При побудові використовувались епюри в однопрогонових балках табл 13.1).
|
Рис 13.6 |
Так при побудові епюри M1 |
від дії примусового кута повороту рухомого затиснення Z1 1 |
деформуються лише стержні - і |
- що примикають до вузла Обидва зазначені стержні мають |
на обох кінцях затиснення Одне із затиснень повертається на одиничний кут Така дія відповідає першому рядку табл 13. Тому епюри згинальних моментів з першого рядка таблиці переносяться
10
на стержні - і - з урахуванням розтягнених волокон див рис 13.4,а Аналогічним чином
побудовано одиничні епюри M2 і M3 а також вантажну епюру MP .
Обчислення коефіці нтів системи канонічних рівнянь
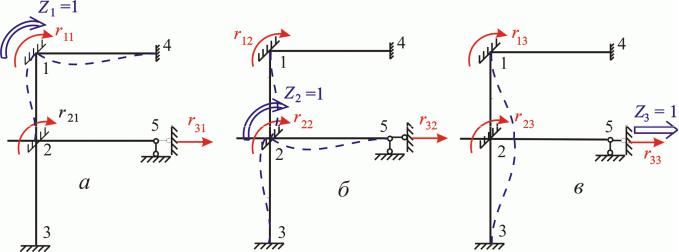
Коефіцієнти системи канонічних рівнянь це реакції у накладених з’єднаннях основної системи від одиничних примусових переміщень та від зовнішнього навантаження Схеми одиничних реакцій наведено на рис 13. а вантажних – на рис 13. Реакції можуть бути визначені з умов рівноваги додаткових з’єднань в усіх одиничних і у вантажному стані основної системи
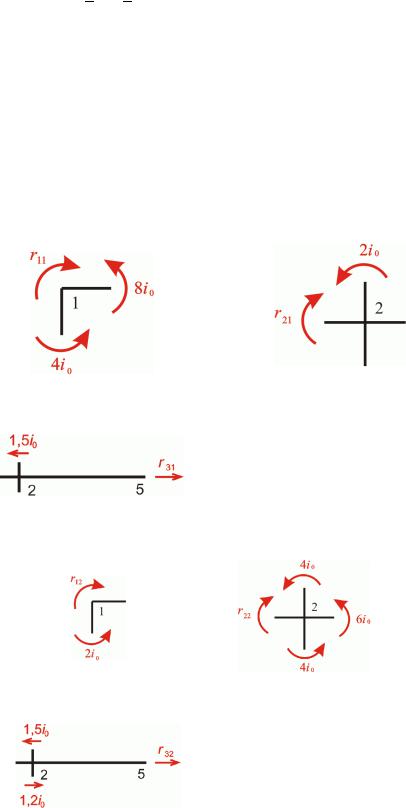
Обчислимо реакції в першому стані рис 13.6,а).
M 0 |
r11 12i0; |
|
M 0 |
r21 2i0; |
|
|
|||
|
|
Fx 0 |
r31 1,5i0. |
|
У другому стані рис 13.6,б).:
M 0 |
r12 2i0; |
M 0 |
r22 14i0 ; |
|
|
Fx 0 |
r32 0,3i0 . |
12
Відносна похибка
21,39150,0008 100% 0,004%.
обудова дійсної епюри згинальних моментів
Дійсна епюра згинальних моментів будується накладанням епюр за допомогою формули
M M1Z1 M2Z2 M3Z3 M .
Результати множення одиничних епюр на дійсні величини основних невідомих наведено на рис 13.7.
Рис 13.7
Дійсна епюра згинальних моментів представлена на рис 13.8,а.
Рис 13.8
Статична перевірка дійсної епюри згинальних моментів
Статична перевірка полягає в перевірці умов рівноваги вузлів рами Для її виконання почергово виокремлюються всі проміжні вузли до яких прикладаються зовнішні вузлові
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
Обчислення поздовжніх сил |
|
|
|
|
|
|
|
|
|
|
|
|||||
Поздовжні сили обчислюємо |
розглядаючи послідовно рівновагу вузлів рами |
Так вирізавши |
||||||||||||||
вузол |
рис 13.10,б |
прикладаємо до нього вже відомі поперечні сили |
а |
також |
невідомі |
|||||||||||
поздовжні сили |
к завжди невідомі сили спрямовуємо в додатному напрямі |
тобто вважаємо ці |
||||||||||||||
сили розтягуючими Тоді з умов рівноваги маємо |
|
|
|
|
|
|
|
|
||||||||
|
|
Fx |
0 |
N1 4 0,996 0 |
|
N1 4 0,996 кН; |
|
|
|
|
|
|
||||
|
|
|
0 |
N1 2 5,713 0 |
|
5,713кН. |
|
|
|
|
|
|
||||
|
|
|
Fy |
N1 2 |
|
|
|
|
|
|
||||||
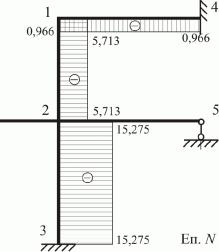
Далі |
виокремлюється вузол |
до |
якого |
прикладаються |
відомі |
поперечні |
сили |
а |
також |
|||||||
поздовжні |
сили |
рис 13.10,в |
Тут |
необхідно |
мати |
на |
увазі |
те що |
поздовжня |
сила |
||||||
N2 1 N1 2 |
5,713 |
а поздовжня сила на консолі N1 k 0 |
Отже маємо |
|
|
|
|
|
||||||||
|
|
Fx |
0 |
N2 5 0,966 0,966 0 |
|
N2 5 |
0; |
|
|
|
|
|
|
|||
|
|
|
0 |
N2 3 4,000 7,275 N2 1 |
0 |
N2 3 16,988 кН. |
|
|
|
|
||||||
|
|
|
Fy |
|
|
|
|
|||||||||
Епюра поздовжніх сил побудована на рис 13.11,а.
Рис 13.11
еревірка загальної рівноваги рами
Проведімо переріз що відокремлює раму від опор і прикладемо в місцях перерізів згинальні
моменти поперечні і поздовжні сили рис 13.11,б |
Перевіримо чи виконуються умови рівноваги |
|
всієї системи |
|
|
Fx 0,996 0,996 |
0; |
|
|
|
|
Fy 16,998 4,725 |
16,575 6 2 8 |
0,002 0; |