

4
7.2.Розрахунок простої рами
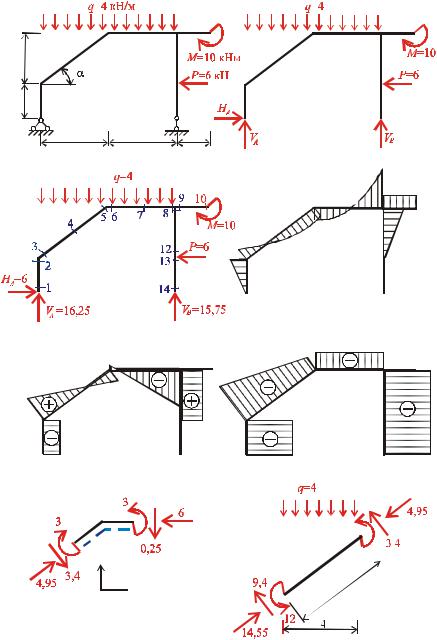
Розрахункова схема рами представлена на рис 7.2,а Необхідно виконати статичний розрахунок рами тобто побудувати епюри згинальних моментів M, поперечних сил Q i поздовжніх сил N.
а |
|
б |
|
|
|
|
K |
|
|
D |
E |
3 |
|
|
|
2 |
|
C |
F |
|
|
||
|
|
|
|
|
|
A |
B |
4 |
4 |
2 |
|
в
0,25
9,4 3,4
6
Q
6
D
y
 x
x
г |
|
28 |
|
|
4,5 |
10 |
10 |
|
|
|
|
11 |
3 |
|
18 |
|
|
|
12 |
3,5 |
|
12
M
е |
4,95 |
6 |
6 |
6 |
|
15,75 |
|
|
|
||
14,55 |
|
|
|
15,75 |
16,25 |
|
|
6 |
|
|
N |
|
|
|
|
|
16,25 |
|
15,75 |
3
D 

5 C
Рис
5
Кінематичний аналіз
Система складається з двох дисків суцільний ламаний стержень що уособлює власне раму
і диск основи |
земля які з’єднуються трьома кінематичними в’язями тобто = 2, =3, П = |
0, В = 0, |
Отже за формулою ебишова (2.1) геометрична змінюваність становить |
|
3 2 2 0 3 0 2 0 3 3 0. |
еометрична структура система складається з двох дисків поєднаних трьома стержнями які всі водночас не паралельні й не перетинаються в одній точці
Висновок рама геометрично незмінювана статично визначувана і утворена за один крок тобто є простою
изначення опорних реакцій
Для визначення опорних реакцій проводимо переріз через опорні з’єднання і замість
розрізаних |
опорних стержнів |
прикладаємо |
реакції VA, H A,VB |
як зовнішні сили невідомої |
||
величини |
рис 7.2,б Знаходимо їх величини з рівнянь рівноваги |
|
||||
|
M A 0 |
VB 8 10 6 2 2 8 4 0 |
|
VB 15,75 кН, |
||
|
|
M B 0 |
VA 8 10 6 2 2 8 4 0 |
VA 16,25 кН, |
||
|
|
Fx 0 |
H A 6 0 |
H A 6 кН. |
|
|
|
|
|
|
|||
Обчислення внутрішніх зусиль і побудова епюр
Розбивку рами на окремі ділянки AC, CD, ED, EK, EF, FB зображено на рис 7.2,б Залежно від виду навантаження на кожній ділянці призначаються два або три перерізи рис 7.2,в).
Визначаємо згинальні моменти в обраних перерізах
|
ни |
0, |
|
|
M1 M1 |
|
|
||
|
ни |
6 2 12 кНм (розтяг зліва |
|
|
M 2 M 2 |
|
|
||
|
л в |
6 2 12 кНм розтяг зверху |
|
|
M 3 M 3 |
|
|||
M 4 |
л в |
16,25 2 6 3,5 4 2 1 3,5 кНм |
розтяг знизу |
|
M 4 |
||||
M 5 |
л в |
16,25 4 6 5 4 4 2 3 кНм |
розтяг знизу |
|
M 5 |
||||
M 6 |
л в |
16,25 4 6 5 4 4 2 3 кНм |
розтяг знизу |
|
M 6 |
||||
M 7 |
л в |
16,25 6 6 3,5 4 6 3 4,5 кНм |
розтяг зверху |
|
M 7 |
||||
6
M8 M8 |
рав 6 3 10 28 кНм розтяг зверху |
|||||
M 9 M 9 |
рав 10 |
кНм |
розтяг зверху |
|||
M10 M10рав |
10 кНм |
розтяг зверху |
||||
M11 |
|
ни |
6 3 18 кНм розтяг праворуч |
|||
M10 |
||||||
M12 |
|
|
ни |
0 |
, |
|
M12 |
|
|||||
M13 |
|
|
ни |
0 |
, |
|
M13 |
|
|||||
M14 |
|
|
ни |
0 . |
|
|
M14 |
|
|||||
Епюра згинальних моменті побудована на рис 7.2,г.
Поперечні сили в перерізах рами
|
|
|
ни |
6 кН , |
|
|
|
Q1 Q2 Fn,1 |
|
|
|||||
Q3 |
|
л в |
VAcos |
HAsin |
16,25 0,8 6 0,6 9,4 кН |
||
Fn,3 |
|||||||
Q5 |
|
л в |
VAcos |
q 4cos |
H Asin |
|
|
Fn,5 |
|||||||
|
|
|
16,25 0,8 4 4 0,8 6 0,6 3,4 кН , |
||||
|
|
л в |
VA |
q 4 16,25 4 4 0,25 кН , |
|||
Q6 Fn,6 |
|||||||
Q8 Fn,8рав VB |
15,75 кН , |
|
|||||
Q9 Q10 |
Fn,9рав |
0 , |
|
|
|||
Q11 Q12 |
Fn,8рав |
P 6 кН , |
|
|
|||
|
|
|
ни |
0 . |
|
|
|
Q13 Q14 Fn,13 |
|
|
|||||
Епюра поперечних сил побудована на рис 7.2, .
Поздовжні сили в перерізах рами
ни |
VA 16,25 кН |
N1 N2 Ft ,8 |
л в |
VAsin |
HAcos |
16,25 0,6 6 0,8 14,55 кН , |
N3 Ft,3 |

7
|
л в |
VAsin HAcos q 4 sin |
|
|
N5 Ft,5 |
||||
|
|
16,25 0,6 6 0,8 4 4 0,6 4,95 кН , |
||
N6 N8 |
Ft,6рав |
P 6 кН , |
|
|
N9 N10 |
Ft,9рав 0 , |
|
||
|
|
ни |
VB 15,75 кН |
|
N11 N12 Ft ,11 |
|
|||
|
|
ни |
VB 15,75 кН . |
|
N13 N14 Ft ,13 |
|
|||
Епюра поздовжніх сил побудована на рис 7.2,е.
еревірки епюр
Перевіримо рівновагу одного з вузлів наприклад вузла D Вирізаний вузол зображено на рис 7.2., До вузла в місцях розрізів прикладено внутрішні зусилля які вибираються з епюр Згинальні моменти які на епюрі М відкладено знизу прикладаються так щоб зумовлювати розтяг нижніх волокон Додатні поперечні сили спрямовано так що вони намагаються повернути вузол за годинниковою стрілкою Від’ємні поздовжні сили спрямовані так щоби викликати стиск в перерізах Складаючи для вузла рівняння рівноваги маємо
Fx 4,95 0.8 3,4 0,6 6 0;
Fy 4,95 0,6 3,4 0.8 0,25 0;
M 3 3 0.
Перевіримо відповідність між епюрами М і Q на ділянках де епюра М прямолінійна
QAC 122 6 кН,
QEF 183 6 кН.
На ділянках де епюра М криволінійна необхідно розглянути рівновагу всього елемента Так стержень CD вирізаний зі схеми представлено на рис 7.2, До стержня довжина якого складає 5 м прикладено зовнішнє рівномірно розподілене навантаження а також внутрішні зусилля які вибираються з епюр M, Q i N Далі для стержня складаються рівняння рівноваги рівняння проекцій на локальні вісі координат x і y стержня а також рівняння моментів відносно будь-якої точки площини наприклад точки .