

Технические данные модулей агрегатной гаммы рпм-25 [9]
|
Модуль |
Ход |
Угловая или линейная скорость перемещения |
Номинальное усилие или номинальный момент |
Погрешность позиционирования с датчиков! |
|
|
аналоговым |
кодовым |
||||
|
Поворота
|
300° |
135 °/с |
800 Н-м |
±4 мин |
±0,56 мин |
|
Подъема |
400 мм |
0,4 м/с |
2500 Н |
±0,4 мм |
±0,05 мм |
|
Сдвига |
800 мм |
0,6 м/с |
2000 Н |
±0,8 мм |
±0,1 мм |
|
Качания |
60° |
45 °/с |
3000 Н·м |
±2 мин |
±0,22 мин |
|
Радиального хода |
1000 мм |
0,6 м/с |
2000 Н |
±0,8 мм |
±0,1 мм |
|
Двойного качания: нижний рычаг |
90° |
65 °/с |
1800 Н·м |
±3 мин |
±0,4 мин |
|
верхний рычаг |
90° |
65 °/с |
1800 Н·м |
±3 мин |
±0,4 мин |
|
Руки: вращение |
360° |
180 °/с |
200 Н·м |
±10 мин |
±1,3 мин |
|
сгибание |
200° |
1807с |
200 Н·м |
±10 мии |
±1,5 мин |
|
Тележки (подвижного основания) |
10 м |
1,5 м/с |
700 Н |
±2 мм |
±0,4 мм |
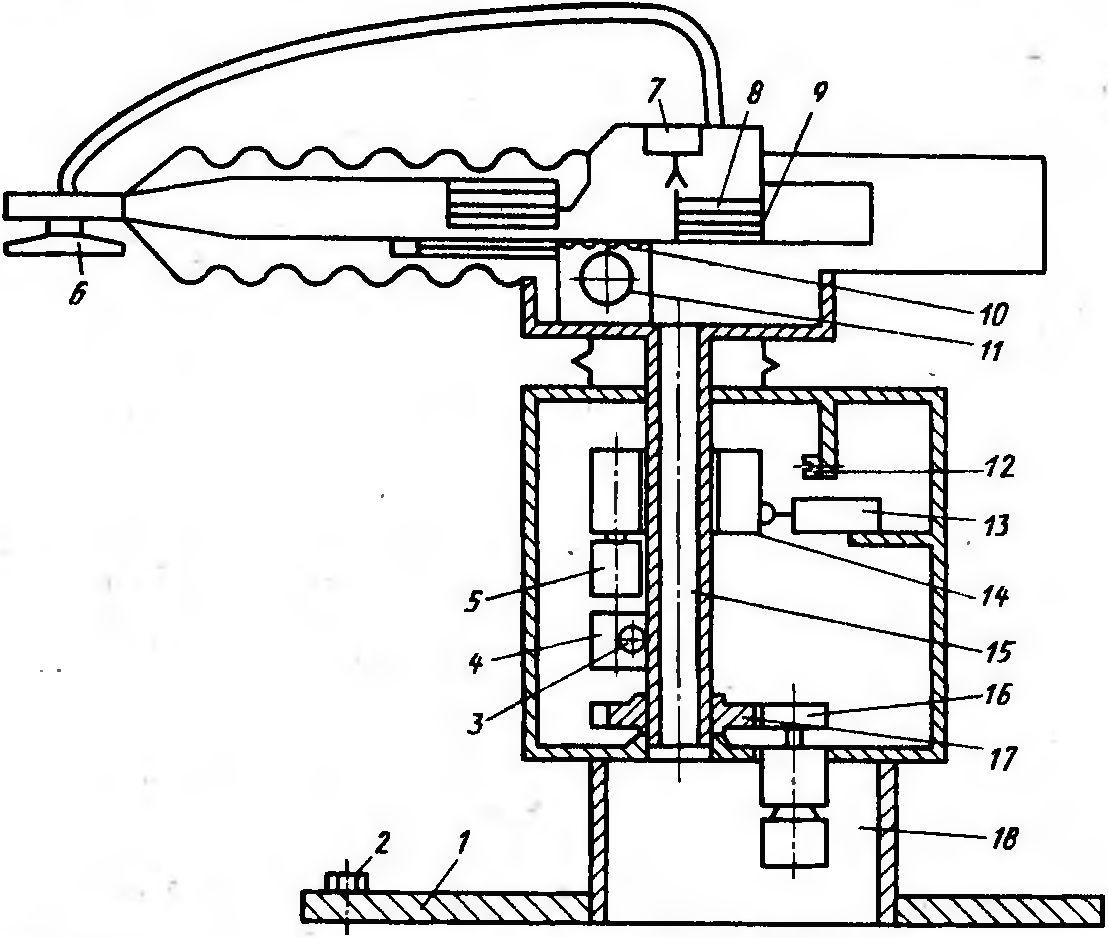
Рис. 164. Кинематическая схема промышленного робота ПМ-4
Рука робота крепится к трубе 15. В продольном направлении рука перемещается с помощью электродвигателя 11 через реечную передачу 10. На корпусе руки закреплена накладка с Т- образными пазами, в которых устанавливаются передвижные флажки 8 для грубой остановки перемещения с помощью бесконтактных переключателей. Точная остановка осуществляется пневмоцилиндром 7, вилка которого входит в контакт с роликовыми упорами, также установленными на накладке 9. Захватное устройство выполнено в виде вакуумного присоса 6, из которого принудительно отсасывается воздух. Положение робота относительно оборудования выверяется четырьмя винтами 2. Робот МП-4 оснащен цикловой системой программного управления.
ПР тельферного типа (с перемещением руки по монорельсу) по сравнению с роботами напольного типа позволяет экономить производственные площадки и осуществлять перемещение объемов манипулирования над технологическим оборудованием. Применение опорных систем большой длины обеспечивает возможность компоновать участки с групповым обслуживанием нескольких технологических установок одним роботом при их линейном расположении.
Мостовая схема ПР позволяет создавать более жесткие и динамические устойчивые схемы. Однако мостовые схемы более громоздки и требуют увеличения массы опорной системы. Характерным признаком этой группы ПР является наличие траверсы или моста, по которому перемещается каретка с рукой; при этом мост перемещается по своим направляющим.