

4. Контроль плотности жидкости
В литейных цехах качество формовочных и стержневых смесей во многом зависит от количественного состава применяемых для их изготовления формовочных растворов, плотность которых является косвенным показателем состава. В этой связи на участках приготовления глинистой суспензии и жидкого стекла приходится непрерывно контролировать плотность.
Плотностью называют величину, определяемую отношением массы тела к его объему. Единица плотности – килограмм на кубический метр (кг/м3). Приборы для измерения плотности жидкости. Называют плотномерами. В зависимости от применяемых методов различают поплавковые, весовые, гидростатические и радиоизотопные плотномеры.
Принцип действия поплавковых плотномеров основан на использовании ареометрического метода. Поэтому их иногда называют ареометрами. В качестве чувствительного элемента используется плавающий или погруженный в жидкость поплавок.
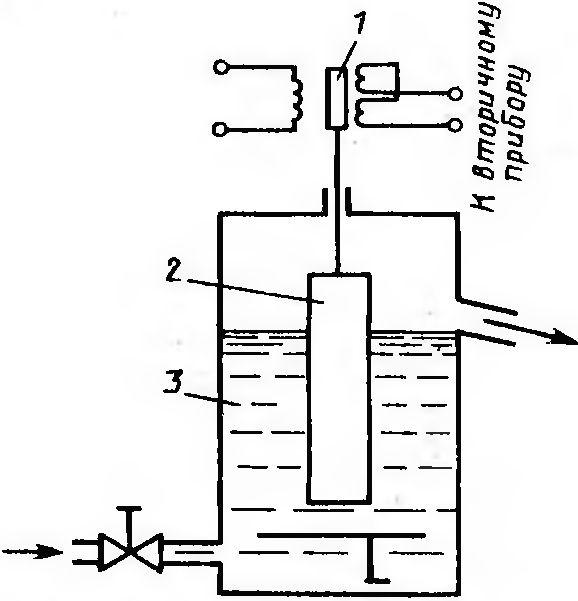
Рис. 95. Плотномер с плавающим буйком
В работе плотномеров с плавающим поплавком используется зависимость степени погружения поплавка с постоянной массой от плотности контролируемой жидкости. Такой плотномер (рис. 95) состоит из емкости 3, в которой непрерывно протекает жидкость. В жидкости плавает металлический полый поплавок 2, жестко связанный с магнитопроводом 1 индукционного преобразователя. Глубина погружения поплавка зависит от плотности жидкости. При движении поплавка вверх, или вниз меняется положение магнитопровода 1, что приводит к изменению индуктивного сопротивления преобразователя, измеряемого вторичным прибором.
Действие весового плотномера основано на взвешивании поплавка, заполненного эталонной жидкостью и погруженного в контролируемую жидкость, или на взвешивании отрезка трубопровода, по которому протекает контролируемая жидкость.
Гидростатические (пьезометрические) плотномеры работают по принципу измерения зависимости потерь давления воздуха, продуваемого через жидкость, от ее плотности.
В измерителе плотности типа КМ (рис. 96) измерение плотности осуществляется разностью давлений в двух пьезометрических трубках: 4 и 8, погруженных на одинаковую глубину в контролируемую и эталонную жидкости. Эталонная жидкость через воронку 3 заливается в сосуд 2, контролируемая жидкость непрерывно протекает через сосуд 7 и переливается через перегородку 1. Сжатый воздух через фильтр 6 и блок управления 5 подается по линии и поступает в пьезометрические трубки. Дифференциальный манометр преобразует перепад давления в электрический сигнал, который подается на вторичный или самопишущий прибор.
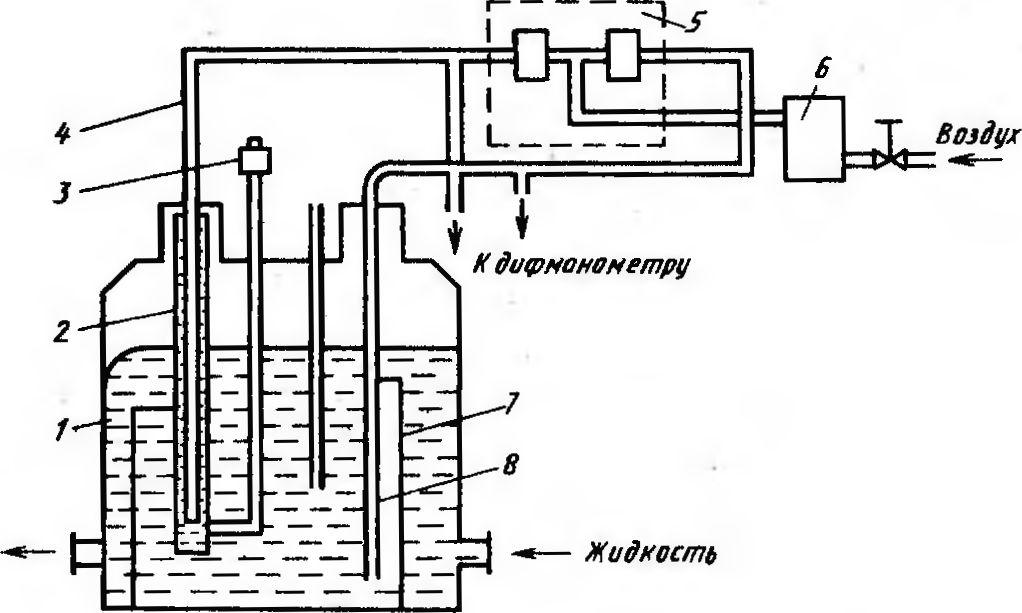
Рис. 96. Измеритель плотности типа КМ
Метод измерения плотности радиоизотопных плотномеров основан на измерении интенсивности γ-излучения после прохождения его через контролируемую среду. Необходимая чувствительность радиоизотопного метода обеспечивается выбором подходящего источника излучения радиоактивного изотопа. В качестве приемников используются счетчики (иногда ионизированные камеры).
5. Техника безопасности при контроле специальных параметров
К числу мероприятий по технике безопасности приборов для измерения состава газа относятся следующие.
Необходимо осуществлять постоянный контроль за герметичностью соединительных линий, исключающий скопление газа в месте установки газоанализатора. Линии поступления и сброса газа должны иметь продувочные краны.
Сброс газа после прохождения измерительной системы должен производиться только в вытяжные коммуникации с принудительной вентиляцией.
Мероприятиями безопасности приборов для измерения влажности сыпучих материалов и плотности жидкости является обеспечение установки приборов в хорошо доступных местах. Все приборы, питаемые электроэнергией, должны быть тщательно заземлены и иметь плавкие предохранители, точно рассчитанные на допустимое значение рабочего тока.
Радиоактивные приборы необходимо эксплуатировать только согласно рабочей инструкции.
Контрольные вопросы и задания
1. Расскажите о классификации приборов, предназначенных для анализа газа.
2. На каком методе основана работа ручного газоанализатора?
3. Как осуществляются анализ газа и определение содержания СО2, O2 и СО в дымовых газах?
4. На каком принципе основана работа магнитного газоанализатора?
5. На каком принципе основана работа оптического газоанализатора?
6. Каким образом осуществляются отбор и подготовка газовой пробы?
7. Как определяется влажность газа?
8. Каким образом определяется запыленность воздуха?
9. Расскажите о методах определения влажности сыпучих материалов.
10. Расскажите о методах контроля плотности жидкости.