

4. Выбор типа регуляторов и параметров его настройки
Применение регуляторов с различными характеристиками для одного и того же объекта приводят к разным результатам. Поэтому тип регулятора необходимо выбирать с учетом свойств объектов.
При отсутствии сведений о динамических свойствах объекта регуляторы следует выбирать по аналогии с действующими объектами или на основании предположительных сведений о свойствах объекта.
Выбор регулятора обычно начинают с определения характера его действия: позиционный, импульсный и непрерывный.
Позиционные регуляторы применяют в объектах с малым запаздыванием или постоянной нагрузкой. Они могут быть рекомендованы для одноемкостных объектов без самовыравнивания.
Например, многие электрические нагревательные печи оснащены двухпозиционными регуляторами температуры. Это объясняется их простотой при достаточной для многих процессов термической обработки точности поддержания заданной температуры нагрева. Точность регулирования температуры повышается при использовании трехпозиционных регуляторов. Однако двух- и трехпозиционное регулирование температуры малопригодно для газовых и мазутных печей, так как при полном выключении подачи топлива и воздуха в рабочем пространстве будут наблюдаться резкое падение давления и подсос холодного воздуха. Позиционные регуляторы могут быть использованы для регулирования давления в объектах с большой емкостью и малым запаздыванием.
Импульсные регуляторы применяют в объектах без большого запаздывания, обладающих средней емкостью при постоянной или плавно меняющейся нагрузке.
П-регуляторы рекомендуются для регулирования объектов, допускающих некоторые отклонения регулируемой величины от заданного значения. При этом нагрузка объектов не должна иметь резких колебаний, но может изменяться плавно. П-регуляторы большей частью используются для одноемкостных объектов.
И-регуляторы можно применять только при регулировании объектов с большой степенью самовыравнивания, иначе система может оказаться неустойчивой. Они используются с различной емкостью, с небольшим запаздыванием и при плавных изменениях нагрузки.
ПИ-регуляторы рекомендуются для регулирования процессов в самых разнообразных объектах, т. е. в объектах с любой емкостью, с большим запаздыванием и с большими, но медленно изменяющимися нагрузками. Например, их широко используют для регулирования температуры в топливных печах, а также для регулирования расхода газа или жидкости. Поскольку ПИ-регуляторы обладают достаточным быстродействием и способны выводить регулируемую величину на заданное значение, их применяют чаще других.
ПД-регуляторы используются в объектах со средней емкостью, при большом времени запаздывания и при малых изменениях нагрузки.
ПИД-регуляторы применяются в объектах с любой емкостью, с большим запаздыванием и при больших и резких изменениях нагрузки, т. е. в тех случаях, когда П- и ПИ-регуляторы не могут справиться с обеспечением требуемого Качества регулирования.
Рассмотренные рекомендации выбора регуляторов носят общий характер. Более точный выбор регулятора возможен лишь с учетом основных свойств объекта регулирования. Поэтому для действующих объектов при наличии кривых разгона или для проектируемых объектов, кривые разгона для которых сняты с действующих аналогов, выбор регуляторов производится на основании определенных расчетов.
Регулятор для объекта регулирования с известными основными свойствами выбирают следующим образом.
1. Должны быть известны или определены по кривой разгона основные параметры объекта: время полного запаздывания тп, постоянная времени объекта Т, степень самовыравнивания ρ и максимальное возмущение μ.
2. Характер действия регулятора определяется с помощью основного характеристического соотношения, т. е. отношения времени полного запаздывания т„ к постоянной времени объекта Т. Если τп/T < 0,2, то можно применять позиционный импульсный регулятор; если τп/Т > 0,2, то следует выбрать регулятор непрерывного действия. Далее все расчеты проводятся для регулятора непрерывного действия.
3. Задаются оптимальным характером типового переходного процесса. Рекомендуется задавать апериодический процесс, когда требуется исключить влияние регулирующего воздействия данной системы на другие регулируемые величины сложного объекта регулирования. Колебательный переходный процесс применяется в тех случаях, когда технологический процесс объекта допускает перерегулирование контролируемой величины.

Рис. 131. Показатели различных типов регуляторов при 20 %-ном перерегулировании:
1 – И-регулятор; 2 – П-регулятор; 3 – ПИ-регулятор; 4 – ПИД-регулятор
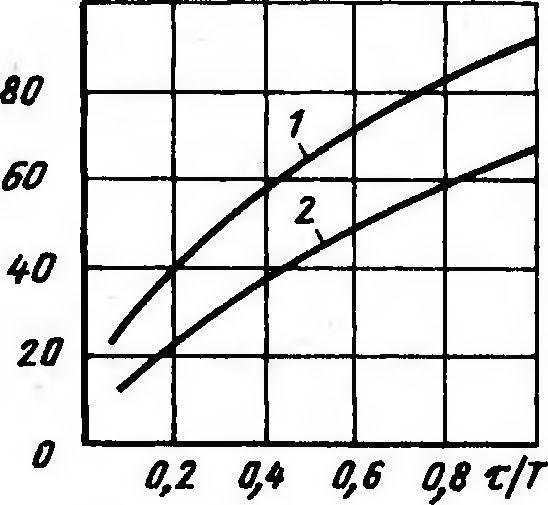
Рис. 132. Влияние характеристического отношения на остаточное отклонение:
1 – апериодический процесс; 2 – 20%-ное перерегулирование
4. Исходя из производственных условий, задаются допустимым динамическим отклонением Хх регулируемой величины и допустимым остаточным ее отклонением Хост по окончании переходного процесса.
5. Вычисляют динамический коэффициент регулирования Rn, который характеризует степень воздействия регулятора на потенциальное отклонение регулируемой величины (при отсутствии регулятора):
![]()
где
![]() –
коэффициент передачи объекта; Хн
и Х0 – конечное и данное
значения регулируемой величины; μ –
максимальное возмущающее воздействие
в % от хода регулирующего органа.
–
коэффициент передачи объекта; Хн
и Х0 – конечное и данное
значения регулируемой величины; μ –
максимальное возмущающее воздействие
в % от хода регулирующего органа.
6. По кривым, приведенным на рис. 131, выбирают тип регулятора непрерывного действия.
7. Для выбранного типа регулятора по кривым (рис. 132) определяют остаточное отклонение δ' в процентах, а затем рассчитывают ΔХост в единицах регулируемой величины по формуле
![]()
и сравнивают его с допустимым значением. Если Хост превышает допустимое значение, то следует выбрать другой тип регулятора.
Таблица 17