

3. Устройства для связи эвм – оператор
Для организации оперативного взаимодействия оператор – машина используются дисплеи, устройства посимвольной и построчной печати, телетайпы, устройства считывания с перфолент и перфокарт, графопостроители и т. п.
Дисплей – устройство отображения информации на экране электронно-лучевой трубки. По способу представления информации на экране дисплеи подразделяются на алфавитно-цифровые и графические. Алфавитно-цифровые дисплеи используют для вывода текстовой и цифровой информации, а графические – для представления на экране сложных графических форм.
Устройство отображения, т. е. терминалы, построенные на основе дисплеев, позволяют оперативно выводить алфавитно-цифровую и графическую информацию в ЭВМ с помощью клавиатуры или светового пера. Его работой управляет микропроцессор.
Устройства построчной и посимвольной печати используются для вывода информации. Непосредственное нанесение символьной и числовой информации на бумажный носитель позволяет оператору легко воспринимать результаты работы ЭВМ без каких-либо преобразователей.
По методу нанесения печатных знаков на носитель информации печатающие устройства делятся на устройства ударного действия и регистрирующие устройства безударного действия.
В печатающих устройствах ударного действия изображение символа цифровой или символьной информации формируется в результате механического удара печатающего молоточка по шрифтоносителю с одновременным нанесением красящего вещества, например ударом через красящую ленту. В безударных печатающих устройствах для нанесения символьной и цифровой информации используют фотографические, фототермические, электрохимические и другие методы регистрации.
По принципу работы печатающие устройства подразделяются на два типа: построчные печатающие устройства и печатающие устройства с последовательной печатью каждого символу.
Принцип построения построчного печатающего устройства с непрерывно вращающимся шрифтоносителем в виде совокупности печатающих колес 4 показан на рис. 154, а. По окружности колеса нанесены все символы, выполненные в виде выпуклых фигур. Отпечатки символов остаются на носителе информации 2 при ударе печатающего молоточка 1 через бумагу и красящую ленту 3 по какой-либо фигуре (символу) на печатающем колесе. За один оборот печатающего колеса можно напечатать всю строку. Бумажный носитель останавливается во время нанесения символов строки.

Рис. 154. Принцип построения построчного печатающего устройства:
а – с вращающимся шрифтоносителем; б – цепочного типа
В печатающем устройстве цепочного типа (рис. 154, б) цепь 5, на которую нанесены символы, движется в горизонтальном направлении. Отпечаток на бумажном носителе 2 образуется при ударе одного из молоточков 1, возбуждаемого механизмом привода, через бумагу 2 и красящую ленту 3 по какой-либо фигуре (символу).
Основу печатающих устройств с последовательной печатью символов составляют электрифицированные пишущие машинки и телетайпы.
Телетайпы применяют в системах ввода-вывода информации ЭВМ из-за их простоты и возможности работы с каналами связи при передаче информации на большие расстояния. Они обладают такими же характеристиками, как и электрифицированные машинки.
Перфокарты и перфоленты являются носителями информации, которые обладают достаточной емкостью, долговечностью и возможностью многоразового использования. Устройства, работающие с перфокартой и перфолентой, осуществляют подготовку исходных данных и программ для ввода в ЭВМ, ввод данных в ЭВМ, а также вывод из нее результатов выполнения программ и другой информации.
Для ввода-вывода графических данных в ЭВМ в настоящее время применяют графические дисплеи и графопостроители.
В планшетных графопостроителях (рис. 155, а) бумага на планшете фиксируется с помощью механических прижимов или вакуумных присосов. Пишущий элемент 1 укреплен на траверсе 2, которая может перемещаться как вдоль, так и поперек планшета. Источниками движения являются два реверсивных шаговых двигателя (на схеме не показаны). В рулонных графопостроителях (рис. 155, б) пишущий элемент 1 имеет только возвратно-поступательное движение, а барабан 3 непрерывно вращается. Наличие рулона обеспечивает большую протяженность выполняемого графика. Применение шаговых двигателей 2 обусловлено простотой управления с помощью цифровой информации.
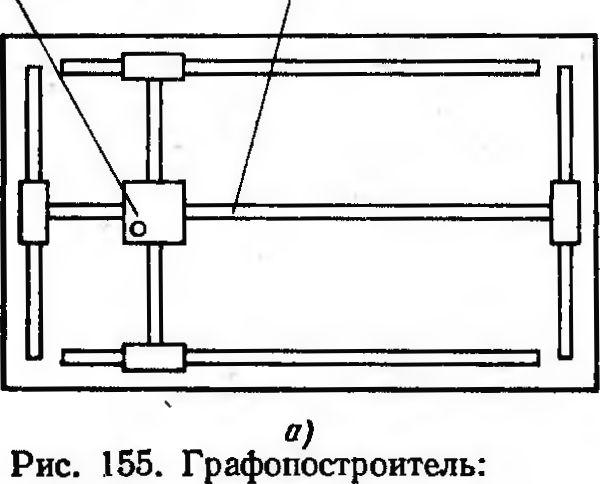
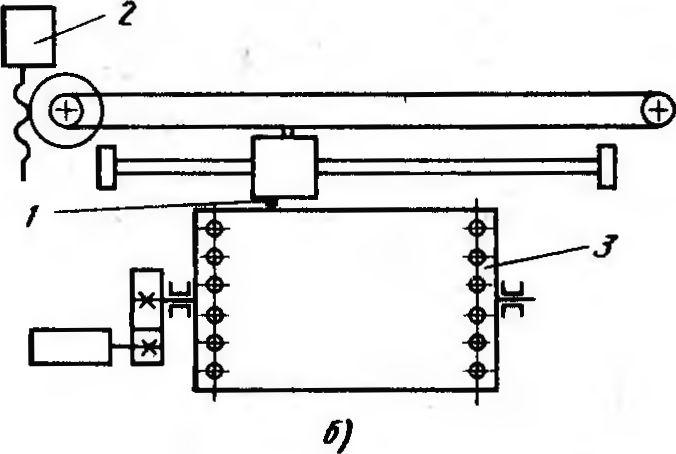
Рис. 155. Графопостроитель:
а – планшетный; б – рулонный
Кроме перечисленных устройств для связи человека с ЭВМ также используются различные вспомогательные средства: функциональные кнопки, ручки управления, программируемая клавиатура и др.