

2. Контроль влажности и запыленности газа
Влажность воздуха играет большую роль в процессах сушки формовочных материалов и приготовления контролируемых атмосфер термических печей, в устройствах кондиционирования воздуха. Влажность во многом определяет санитарно- гигиенические условия труда.
Измерительные приборы, предназначенные для измерения величин, характеризующих влажность газов, получили название гигрометров или влагомеров.
Для контроля и измерения влажности газов используют многочисленные методы, основанные на различных принципах. Наибольшее практическое распространение получили психрометрический и сорбционный методы.
Психрометрический метод основан на использовании изменения степени охлаждения поверхности увлажненного тела при испарении с нее воды. Степень охлаждения поверхности зависит от параметров влажности газа, омывающего эту поверхность. Рассмотренное явление носит название психрометрического эффекта. В приборах, принцип действия которых основан на психрометрическом эффекте, измерение осуществляется с помощью двух термометров: сухого и влажного. Испарение влаги с поверхности резервуара влажного термометра происходит тем интенсивнее, чем ниже влажность воздуха. Поэтому в условиях термодинамического равновесия разность показаний сухого и влажного термометров характеризует влажность воздуха и называется психрометрической разностью.
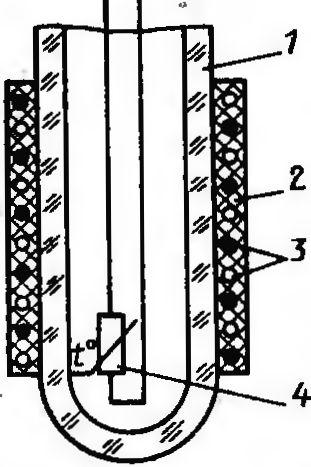
Рис. 91. Электрический подогреваемый преобразователь влажности газа

Рис. 92. Оптическая система измерителя запыленности
Сорбционный метод измерения влажности газов основан на измерении электрических свойств влагосорбирующего материала в зависимости от изменения влажности окружающей среды.
Сорбционный метод измерения влажности используется в кулонометрических и электролитических влагомерах. Принцип действия кулонометрического влагомера основан на непрерывном поглощении влаги из контролируемого газового потока пленкой гидрофильного вещества и одновременном разложении воды в толще пленки путем электролиза на водород и кислород. В установившемся режиме значение электролитического тока является мерой влажности контролируемого газа. Погрешность прибора не превышает 6%.
Электролитические влагомеры работают по принципу зависимости электрических свойств чувствительного элемента от влажности окружающего газа. Такие преобразователи по конструктивному выполнению подразделяют на подогреваемые и неподогреваемые. Первые получили наибольшее распространение.
Принцип действия электролитического подогреваемого преобразователя основан на измерении температуры гигрометрического равновесия. В этом преобразователе (рис. 91) используют свойство гигроскопичности хлористого лития. На запаянную с одного конца кварцевую трубку 1 наносят слой стеклоткани 2, пропитанный хлористым литием. Поверх стеклоткани наматывают две не соединяющиеся друг с другом проволоки 3 из благородных металлов, выполняющих роль электродов. На электроды подается переменный ток. Во внутрь кварцевой трубки помещают термометр сопротивления 4. При соприкосновении газа, содержащего водяные пары с хлористым литием, последний увлажняется, образуя электролит. Так как на электроды подается напряжение, то через электролит потечет ток, который приведет к разогреву преобразователя и постепенному испарению влаги. Процесс испарения будет сопровождаться охлаждением преобразователя. Спустя некоторое время между процессом насыщения парами газа и Испарением влаги наступит равновесие. Температура равновесия является мерой, Влажности газа, так как по ее значению может быть определена точка росы. Этот преобразователь позволяет осуществлять автоматический контроль точки росы в процессе изготовления и подачи контролируемых атмосфер в рабочее пространство нагревательных печей.
Измерители запыленности осуществляют контроль запыленности воздушной среды и технологических газов, а также контроль концентрации аэрозольных, частиц.
Промышленность выпускает анализаторы запыленности типа АЗ. Они предназначены для определения запыленности воздуха и технологических газов, проверки эффективности работы технологических воздушных и газовых фильтров, определения концентрации аэрозоля в воздухе, нахождения источника запыленности аэрозольными частицами.
Прибор представляет собой фотоэлектрический счетчик аэрозольных частиц с пределами измерения концентрации пыли от 1 до 300 000 частиц в литре. В приборе имеется переключатель размера регистрируемых частиц с 0,4 до 10 мкм.
Принцип работы прибора основан на рассеивании света аэрозольными частицами. При этом существует количественная зависимость между размерами частиц и интенсивностью рассеянного света. Чувствительным элементом прибора является оптический преобразователь (рис. 92). Анализируемая пыль просачивается через измерительную полость 10 преобразователя с постоянным расходом. Перпендикулярно измерительной плоскости расположены источник света 6, два объектива 7 и 9 и диафрагма 8, создающая сфокусированный световой луч. Под прямым углом к нему установлены объектив 5 и диафрагма 4, которые фокусируют луч, направленный от источника света 6 к фотоэлектронному усилителю 3. Модулятор светового потока 2, призмы 1 и 11 служат для контроля и калибрования размеров частиц пыли.
Если в измерительной полости пыли нет, то фототок в фотоэлектронном усилителе отсутствует. При попадании пыли в измерительную камеру от ее частиц появляется рассеянный свет, и на выходе усилителя образуется электрический сигнал. Длительность сигнала пропорциональна времени пролета частиц через полость, а его амплитуда определяется размерами частиц.
Количество пыли определяется в зависимости от измеряемого предела по электромеханическому счетчику или по шкале показывающего прибора, отградуированной в единицах измерения запыленности (части на один литр).