

2. Регуляторы прерывистого (дискретного) действия
Регуляторы прерывистого действия подразделяются на позиционные, импульсные и цифровые.
Позиционными (релейными) называют регуляторы, у которых регулирующий орган может занимать определенное число положений. В литейных и термических цехах используются в основном двух- и трехпозиционные регуляторы.
В двухпозиционных регуляторах регулирующий орган может занимать только два положения: больше-меньше, включено-выключено или открыто-закрыто. Количество энергии или вещества, подводимое к объекту или отводимое от объекта при установке регулирующего органа в положение «больше», будет превышать среднюю потребность, а в положении «меньше» будет ниже нее. Например, при регулировании температуры в электрической печи регулятор при значении регулируемой величины ниже заданного значения включает нагревательные элементы, а при превышении – выключает. Отклонения температуры от заданного значения оказывают влияние на длительность включения и выключения нагревательных элементов. При таком способе регулируемая величина колеблется относительно заданного значения.
Изменение мощности и регулируемой температуры во времени при двухпозиционном регулировании температуры печи показано на рис. 129. Величины t1 и t2 определяют возможные стабильные температуры печи, соответствующие длительному включению нагревательных элементов с мощностями N1 и N2 соответственно. Значения мощностей выбраны таким образом, чтобы заданная температура tзад находилась в интервале температур t1 и t2.
Основные параметры такого процесса могут быть определены по приближенной формуле
![]()
где Δt+ – отклонение температуры от заданного значения, °С; N1 и N2 – мощности нагревательных элементов, кВт; τп – время запаздывания, с; Т – постоянная времени объекта, с.
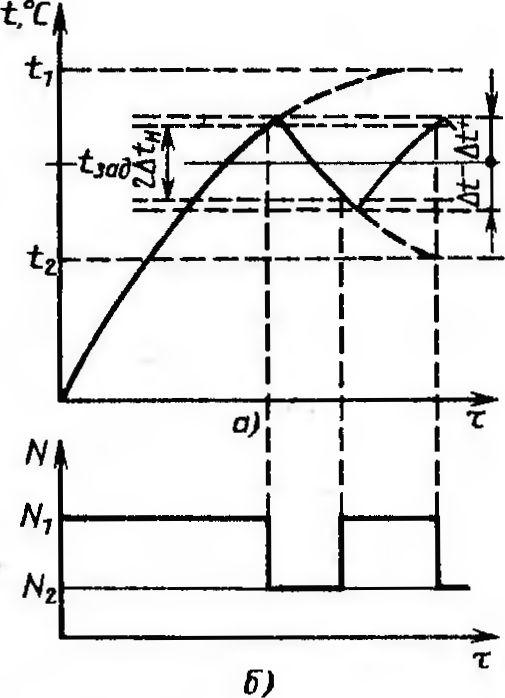
Рис. 129. Изменение при диухпозиционном регулировании: а – температуры; б – мощности

Рис. 130. Графическое изображение действия импульсного регулятора
Как видно из формулы, колебания регулируемой температуры уменьшаются при уменьшении регулируемой мощности N1 – времени запаздывания τп и увеличении постоянной времени объекта Т.
Уменьшение регулируемой мощности N1 – N2 вызывает сближение температур t1 и t2 до заданной температуры tзад.
В тех случаях, когда не требуется высокая точность регулирования, мощность N2 можно принимать равной нулю, а мощность N1 – равной максимальной мощности, т. е. регулировать по принципу включено-выключено.
Колебание температуры снижается при уменьшении времени полного запаздывания τп. Здесь под запаздыванием понимается не только время запаздывания объекта, но и время запаздывания самого регулятора. Следовательно, колебания температуры могут быть уменьшены путем выбора регулятора с меньшим диапазоном нечувствительности 2Δtн.
Колебание температуры уменьшается при увеличении постоянной времени объекта Т. Поэтому чем больше емкость объекта, тем благоприятнее осуществляется двухпозиционное регулирование.
Одним из основных недостатков двухпозиционного регулирования является невозможность сочетания быстрого нагрева (для этого необходима большая мощность) и высокой точности регулирования, для которой требуется небольшая избыточная мощность.
Дальнейшее развитие позиционного регулирования пошло в двух направлениях: улучшение свойств двухпозиционного регулирования и переход на трехпозиционное регулирование. Первое направление обеспечивается созданием так называемого прерывистого двухпозиционного регулирования, т. е. введением дополнительных импульсов по первой и второй производным и применение» экспоненциальных обратных связей. При введении трехпозиционного регулирования колебания регулируемого параметра уменьшаются на 20 ... 30 % по сравнению с колебаниями при двухпозиционном регулировании.
В трехпозиционных регуляторах регулирующий орган может занимать дополнительно еще среднее положение, обеспечивающее подачу энергии или вещества в объект в количествах, соответствующих его потреблению при нормальной нагрузке и заданном значении регулируемой величины. Таким образом, в трехпозиционных регуляторах включение и выключение мощности осуществляется также ступенчато, но имеется некоторая зависимость между отклонением регулируемой величины от заданного значения и включаемой мощностью. Трехпозиционные регуляторы способны вести регулирование более качественно, чем двухпозиционные.
Позиционные автоматические регуляторы применяются главным образом для регулирования температуры в электрических термических печах.
В регуляторах импульсного действия отклонения регулируемой величины (рис. 130, а) преобразуются в последовательность импульсов, следующих друг за другом через определенные интервалы времени. Импульсы могут отличаться амплитудой, длительностью и полярностью.
В зависимости от характеристики импульсов рассматриваемые регуляторы подразделяются на три группы. К первой группе относятся регуляторы, в которых амплитуда импульсов пропорциональна изменению регулируемой величины (рис. 130, б). Во вторую группу входят регуляторы с преобразованием регулируемой величины в последовательность импульсов, длительность которых зависит от отклонения регулируемой величины (рис. 130, в). Импульсные регуляторы с преобразованием отклонения регулируемой величины в последовательность импульсов с постоянными амплитудами и длительностью, но с переменным знаком, относятся к третьей группе (рис. 130, г). Знак импульсов зависит от изменения знака регулируемой величины. Импульсные регуляторы применяются для регулирования медленно протекающих процессов в объектах регулирования, обладающих большой инерционностью и значительным запаздыванием.
Если при регулировании технологического процесса используется цифровой регулятор или цифровая управляющая машина, то такая система носит название цифровой автоматической системы регулирования. Такие системы рассмотрены в разделе IV.