

3. Основные технические показатели роботов
К числу основных технических показателей ПР относятся грузоподъемность, число степеней подвижности, погрешность позиционирования, рабочая зона, мобильность и т. п.
Грузоподъемность ПР определяется как суммарная грузоподъемность его рук. Грузоподъемность руки – это наибольшая масса груза (включая массу захватного устройства), которым может манипулировать робот. Для некоторых типов ПР важным показателем является также усилие (или крутящий момент), развиваемое исполнительным механизмом при заданных условиях. К числу таких показателей относятся усилие зажима или крутящий момент ротации (вращения) захватного устройства.
Число степеней подвижности – это сумма возможных координатных перемещений объекта манипулирования. Для некоторых типов роботов иногда дополнительно определяется число степеней подвижности захватного устройства.
Погрешность позиционирования – это отклонение заданной позиции исполнительного механизма от фактической при многократном позиционировании (повторении движения). Она оценивается в линейных или угловых единицах измерения.
Рабочая зона – пространство, в котором может находиться при работе захватное устройство. Коэффициент сервиса исполнительного устройства робота характеризует возможность подхода захватного устройства к заданной точке с разных направлений и дает представление о его двигательных возможностях.
Мобильность промышленного робота определяется его возможностью совершать движения.
Контрольные вопросы и задания
1. Что называется роботом?
2. Что называется манипулятором?
3. Расскажите о видах манипуляторов и видах их управления.
4. В чем заключается различие между промышленным и интерактивным роботом?
5. По каким признакам классифицируются промышленные роботы?
6. Расскажите о системах управления промышленными роботами.
7. Расскажите о структуре промышленных роботов.
8. Перечислите основные технические показатели роботов и дайте им определение.
Глава 23. Конструкции промышленных роботов
1. Промышленные роботы агрегатно-модульного типа
Создание широкого диапазона конструкций ПР возможно только при использовании унифицированных узлов и блоков (модулей). Применение агрегатно-модульного принципа построения ПР снижает их стоимость по сравнению с универсальными.
Основные модули (основания, захватные устройства, поворотно-подъемные механизмы и др.) в зависимости от назначения могут иметь несколько типоразмеров. Различают ПР напольного, тельферного и мостового типов.
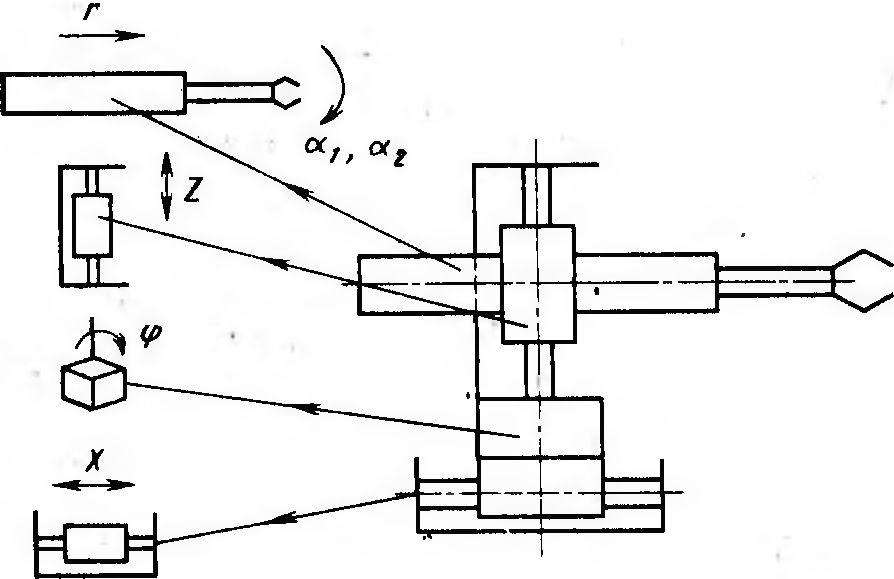
Рис. 163. Схема построения отдельных модификапий агрегатной гаммы ПР
Гамма агрегатных роботов типа ЛM40 с ограниченным разнообразием технических показателей включает 24 модификации, различающиеся числом степеней подвижности (от 2 до 6), формами рабочих зон, комбинациями и расположением стыковочных узлов (рис. 163). Технические данные приведены в табл. 18.
Таблица 18
Технические данные агрегатной гаммы промышленных роботов лм40ц.00.00 [9]
|
Исполнение |
Число степеней подвижности при компоновке |
x, мм |
z, мм |
r, мм |
φ, ° |
α1, ° |
α2, ° |
|||
|
47 |
20 |
06 |
40 |
|||||||
|
01 |
6 |
5 |
4 |
5 |
500 |
500 |
500 |
270 |
180 |
180 |
|
02 |
6 |
5 |
4 |
5 |
1000 |
|||||
|
03 |
5 |
4 |
3 |
4 |
500 |
– |
||||
|
04 |
5 |
4 |
3 |
4 |
1000 |
– |
||||
|
05 |
4 |
3 |
2 |
3 |
500 |
– |
– |
|||
|
06 |
4 |
3 |
2 |
3 |
1000 |
– |
– |
|||
|
Примечание. Грузоподъемность 40 кг. Привод – гидравлический. Система управления – цикловая. Метод программирования перемещений – по упорам. Погрешность позиционирования ±2,0 мм. Наибольший вылет руки 1885 мм. Скорости линейных перемещений: 0,2; 0,35; 0,6 м/с. Угловая скорость перемещений: 90 и 180°С. Схема кодификации моделей: ЛМ40Ц 47.01, где 47 – компоновка; 01 – исполнение. |
||||||||||
Роботы этой гаммы предназначены для автоматизации технологических процессов в литейных цехах с поточным характером производства. Они используются, например, в составе комплексов литья по выплавляемым моделям. Роботы могут также применяться для съема и переноса отливок в составе комплексов литья под давлением.
Комплект промышленных роботов серии СМ40 содержит 10 типоразмеров напольных стационарных и передвижных роботов. Этот ряд создан на базе 16 универсальных модулей механической системы: четырех типоразмеров рук для перемещения зажима и поворота заготовки; трех типоразмеров захватных устройств для различных деталей; трех типоразмеров оснований; двух типоразмеров устройств приводов для линейного перемещения и вращательного движения руки; трех типоразмеров системы управления на базе программных барабанов. У всех роботов этой серии предусмотрен гидравлический привод на базе гидроцилиндров с управлением от индивидуальных электрозолотниковых устройств. Цикловая позиционная система управления с программоносителем, выполненным в виде командоаппарата, имеет ограниченное число точек позиционирования. Смена программы осуществляется путем замены барабана командоаппарата. Основные характеристики и область применения этих промышленных роботов приведены в табл. 19.
Гамма электромеханических роботов модульного типа универсального назначения типа РПМ-25 разработана на базе группы модулей, включающих стационарное и подвижное основания в напольном или подвесном исполнении, блоки сдвига, подъема, одинарного и двойного качания, радиального хода, три модификации рук (с одной, двумя и тремя степенями свободы). Комбинацией модулей (без их повторения в одной инструкции) можно получить 95 модификаций промышленных роботов.
Технические данные модулей приведены в табл. 20.
Кинематическая схема наиболее распространенного электромеханического робота МП-4 приведена на рис. 164. На основании 1 закреплен коробчатый корпус, сваренный из листовой стали. Внутри корпуса расположены механизмы подъема рук и поворота их вокруг вертикальной оси. Поворот осуществляется от мотора 18 через редуктор и шестерню 16, находящуюся в зацеплении с колесом 17, которое жестко закреплено на трубе 15, соединенной с барабаном 14. На наружной поверхности барабана выполнены Т-образные пазы, в которых закреплены флажки, входящие при повороте в пазы бесконтактных переключателей 12, выдающих команду на остановку. Точная доводка до позиции обеспечивается штоком пневмоцилиндра 13, воздействующим на жесткий упор, закрепленный на барабане. Механизм подъема состоит из электродвигателя 5, который через червячный редуктор 4 и шестерню 3 связан с рейкой, выполненной заодно с трубой 15. Промежуточных позиций механизм подъема не имеет и работает от упора до упора.
Таблица 19