

3. Электронные усилители
К электронным ламповым и полупроводниковым усилителям относятся устройства систем автоматики, в которых используются многоэлектродные лампы или полупроводниковые приборы, значение активного сопротивления которых зависит от интенсивности или полярности электрического поля.
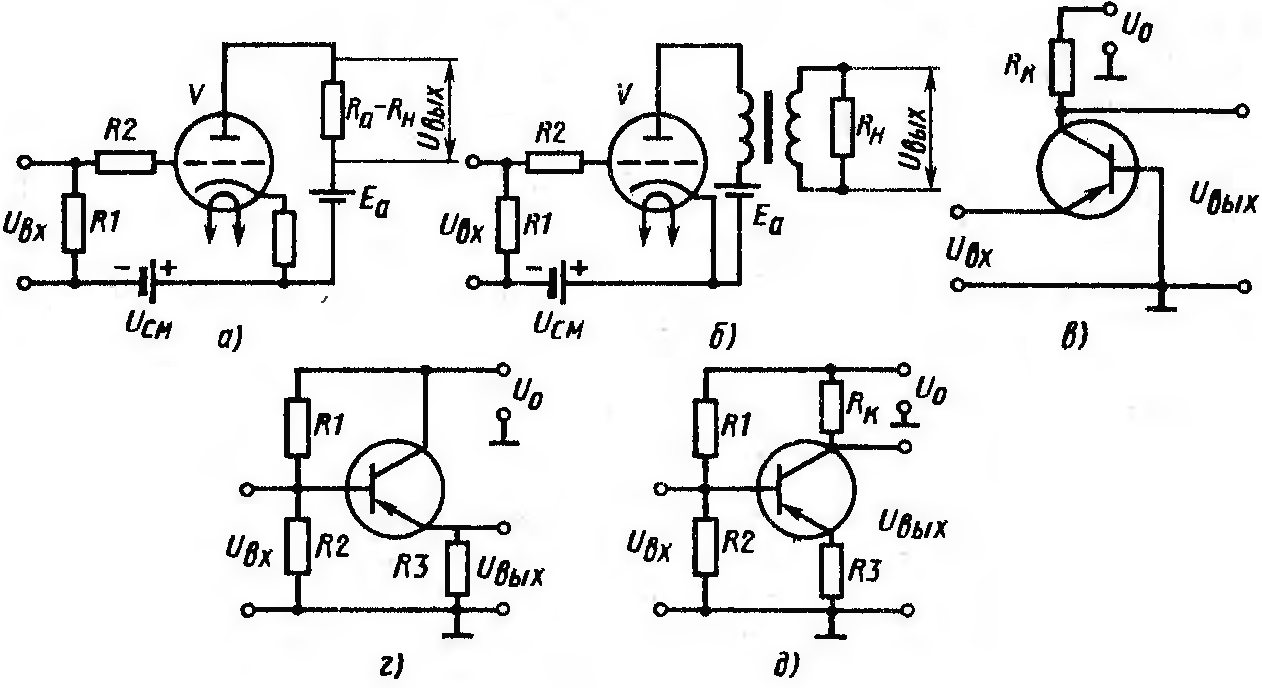
Рис. 14. Схемы электронных усилителей:
а – электровакуумных постоянного тока; б – переменного тока; в – полупроводниковых с общей базой; г – с общим коллектором; д – с общим эмиттером
Элемент усилителя, состоящий из электронной лампы или полупроводника с резисторами и конденсаторами, называют усилительным каскадом. Если для усиления входного сигнала одного каскада недостаточно, то применяют последовательное соединение нескольких каскадов. В этом случае первые каскады выполняют роль предварительного усиления, обеспечивая работу мощного выходного каскада. Различают однокаскадные и многокаскадные усилители.
Схема простейшего однокаскадного усилителя на электронной лампе показана на рис. 14, а. Входной сигнал Uвх подается на сетку электронной лампы V, в анодную цепь которой включен резистор (нагрузка) Rа = Rн. При изменении значения Uвх будет меняться значение анодного тока Iа, а следовательно, и значение выходного напряжения Uвых, равного падению напряжения на нагрузочном (анодном), резисторе Rн от протекания анодного тока. В этом и заключается усилительный эффект. Резистор R1 служит для ограничения сеточных токов. Резистор R2 введен для стабилизации выходного сопротивления усилителя. Рассмотренная схема является нереверсивной.
Схема простейшего усилителя переменного тока с трансформаторным выходом (рис. 14, б) отличается от схемы усилителя постоянного тока только тем, что нагрузочный резистор Rн не является одновременно анодным резистором Ra а включен в анодную цепь через трансформатор, благодаря чему выходное напряжение Uвых содержит лишь переменную составляющую.
Применяемые в системах автоматики усилители на вакуумных лампах, в большинстве случаев миниатюрного (пальчикового) типа, выгодно отличаются от прочих видов усилителей ничтожно малой входной мощностью и незначительной инерционностью. Недостатком электронных ламповых усилителей являются низкий КПД и небольшая выходная мощность, а также ограниченные надежность и срок службы. Они широко используются в системах автоматики для предварительного усиления сигналов, полученных от преобразователей. Предельная выходная мощность не превышает 100 Вт.
Для построения полупроводниковых усилителей в качестве управляющих устройств используют полупроводниковые триоды (транзисторы), изготовляемые из германия или кремния с соответствующими примесями.
Транзисторы могут включаться в усилительные схемы тремя различными способами: с обшей базой, с общим коллектором и общим эмиттером.
Схема полупроводникового усилителя с общей базой (рис. 14, в) соответствует редко применяемой в автоматике схеме электронного усилителя с общей сеткой. В этих усилителях электрод базы является общим для входной и выходной цепей. Выходное напряжение находится в фазе с входным. Коэффициент усиления по току меньше единицы, а по напряжению много больше единицы. Усилители, построенные по такому принципу, используют в качестве входного каскада по отношению к преобразователю с низким выходным сопротивлением.
В полупроводниковом усилителе с общим коллектором (рис. 14, г) коэффициент усиления по току на много больше единицы, а по напряжению – меньше единицы. Резисторы R1 и R2 составляют делитель напряжения, с которого снимается напряжение смещения. Усилители, построенные по такой схеме, применяют в качестве первого каскада усиления для согласования включения преобразователя с высокоомным выходом или в качестве выходного каскада при работе с низкоомной нагрузкой.
Схема с общим эмиттером (рис. 14, д) соответствует наиболее распространенной схеме электронного усилителя с общим катодом. В схеме резистор Rн является нагрузочным в цепи коллектора, а резисторы R1 и R2 образуют делитель напряжения, с которого снимается напряжение смещения. Схема с общим эмиттером получила наибольшее практическое применение. Она обеспечивает высокий коэффициент усиления по мощности и току и имеет сравнительно большое входное сопротивление.
В настоящее время транзисторные усилители вытесняют ламповые усилители из многих сфер применения. Это объясняется тем, что срок службы транзисторов составляет несколько десятков тысяч часов, а аварийные выходы транзисторов при соответствующем температурном режиме весьма редки.
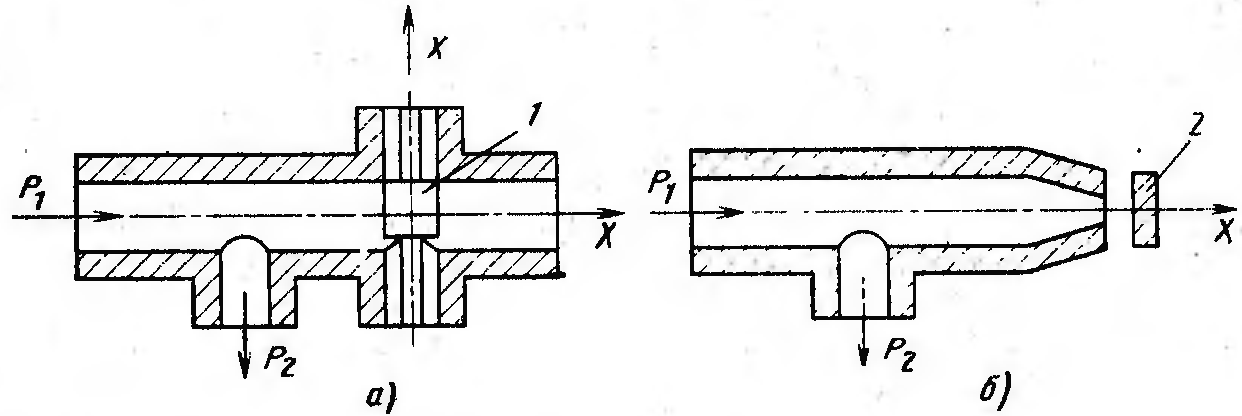
Рис. 15. Схемы пневматических усилителей дроссельного типа:
а – с дросселем; б – с соплом-заслонкой
Гидравлические и пневматические усилители применяются в системах автоматики для усиления сигналов по мощности. Принципиально схемы таких усилителей не имеют различия. Если в пневматических усилителях используется сжатый воздух, то в гидравлическом усилителе – жидкость под давлением (чаще масло).
Различают три типа гидравлических усилителей: золотниковые, дроссельного типа и струйные.
В золотниковых гидравлических усилителях входной сигнал, открывая или закрывая золотник или вентиль, изменяет поступление вспомогательной энергии (масла под давлением) в исполнительный механизм.
В усилителях дроссельного типа (рис. 15, а, б) выходное давление Р2 рабочей жидкости зависит от перемещения X дросселя 1 или заслонки 2 при постоянном давлении Р1.
Принцип работы струйного усилителя (рис. 16) заключается в том, что кинетическая энергия струи масла, направленная в приемное сопло, преобразуется в потенциальную энергию давления. Давление в сопле зависит от положения трубки. В корпусе 1 усилителя расположена струйная трубка 2 с сопловой насадкой 6. С одной стороны трубка связана с толкателем преобразователя 7, а с другой – с пружиной задатчика 4. Сжатие пружины регулируется винтом 3. Струйная трубка сообщается каналом 9 с масляным насосом и может поворачиваться на некоторый угол вокруг оси 0. Расширяющиеся сопла 5 соединены трубопроводами с обеими полостями цилиндра двойного действия исполнительного механизма. Трубка 8 предназначена для слива масла в бак, где установлен насос.

Рис. 16. Схема гидравлического струйного усилителя
Если регулируемый параметр соответствует заданному значению, то трубка находится в нейтральном положении и струя рабочей жидкости одинаково перекрывает оба приемных сопла. В полостях цилиндра создается одинаковое давление и поршень исполнительного механизма не перемещается. При отклонении регулируемого параметра от заданного значения, т. е. при появлении разности усилий со стороны задатчика и чувствительного элемента, струйная трубка поворачивается в сторону одного из приемных сопел, в котором давление возрастает, что и вызывает перемещение поршня.
К преимуществам усилителей подобного типа можно отнести простоту конструкции, отсутствие повышенных требований к очистке масла и высокую эксплуатационную надежность. Основным недостатком усилителя являются неполное использование мощности потока рабочей жидкости и неизбежная ее утечка.
Пневматические усилители по принципу аналогичны гидравлическим и имеют такие же преимущества и недостатки.
Гидравлические и пневматические усилители находят применение в автоматических системах регуляторов давления и расхода.