

12 Момент импульса и момент силы относительно точки и оси. Уравнение моментов
Векторное уравнение эквивалентно трем скалярным уравнениям:
,которые получаются из векторного уравнения путем проектирования на неподвижные оси декартовой системы координат.
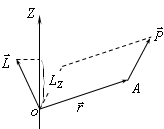
Возьмем в интересующей нас системе отсчета произвольную неподвижную ось Z. Пусть относительно некоторой точки О на оси Z момент импульса частицы А равен , а момент силы, действующей на частицу .
Моментом импульса относительно оси Z называют проекцию на эту ось вектора , определенного относительно произвольной точки «О» данной оси.
 Аналогично
вводят и понятие момента силы относительно
оси.
не зависят от выбора точки О
на оси Z.
Аналогично
вводят и понятие момента силы относительно
оси.
не зависят от выбора точки О
на оси Z.
Спроектировав векторное уравнение на ось-Z, получим, т.е.производная по времени от момента импульса частицы относительно оси Z равна моменту силы относительно этой оси В частности, если , то . Другими словами, если момент силы относительно некоторой неподвижной оси Z равен нулю, то момент импульса частицы относительно этой оси остается постоянным. При этом сам вектор может и меняться.
Выясним, какая механическая величина ответственна за изменение вектора в данной системе отсчета. Для этого продифференцируем по времени:
![]()
Так
как точка О неподвижна, то вектор
![]() равен скорости
частицы, т.е. совпадает по направлению
с вектором
,
поэтому
равен скорости
частицы, т.е. совпадает по направлению
с вектором
,
поэтому
![]() =0.
Далее
=0.
Далее
![]() ,
где
– результирующая всех сил, действующих
на частицу.
,
где
– результирующая всех сил, действующих
на частицу.
![]() .
Величину
.
Величину
![]() называют моментом силы
относительно точки О. Обозначив ее
,
запишем формулу в виде:
.Моментом
силы
относительно точки О
называется векторное произведение
радиуса вектора
на силу
.
называют моментом силы
относительно точки О. Обозначив ее
,
запишем формулу в виде:
.Моментом
силы
относительно точки О
называется векторное произведение
радиуса вектора
на силу
.
![]() .
.
Вектор , как и , является аксиальным. Модуль этого вектора
M = l F, где l – плечо вектора относительно точки О.
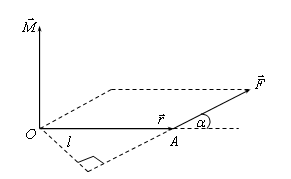
Рис. 5.2
Итак, производная по времени от момента импульса частицы относительно некоторой точки О выбранной системы отсчета равна моменту равнодействующей силы относительно той же точки О.
Это уравнение называют уравнением моментов:
1)момент не изменяется, если точку приложения силы перенести в любую другую точку, расположенную по линии действия силы.
2)это значит, что момент равнодействующей двух или нескольких сил относительно некоторого начала равен геометрической сумме моментов составляющих сил относительно того же начала.
14 Уравнение динамики твердого тела, вращающегося вокруг неподвижной оси
Моментом силы F относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора г, проведенного из точки О в точку А приложения силы, на силу F (рис. 25):
M = [rF].
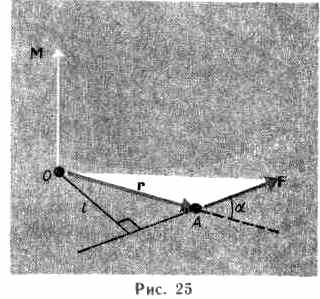
Здесь М — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от г к F.
Модуль момента силы
M = Frsin= Fl, (18.1)
где — угол между г и F; rsin =l — кратчайшее расстояние между линией действия силы и точкой О — плечо силы.
Моментом силы относительно неподвижной оси z называется скалярная величина Мz, равная проекции на эту ось вектор а М момента силы, определенного относительно произвольной точки О данной оси 2 (рис.26). Значение момента Мz не зависит от выбора положения точки О на оси z.
Если ось z совпадает с направлением вектора М, то момент силы представля-
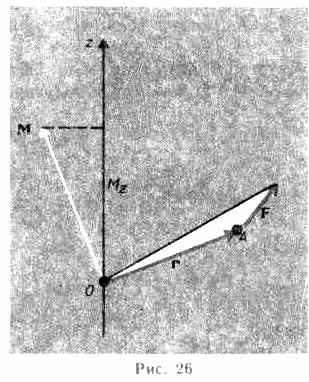
ется в виде вектора, совпадающего с осью:
Мz = [rF]z.
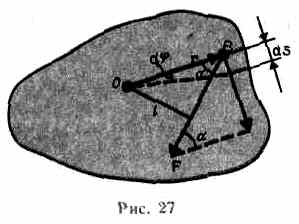
Найдем выражение для работы при вращении тела (рис.27). Пусть сила F приложена в точке В, находящейся от оси вращения на расстоянии r, — угол между направлением силы и радиусом-вектором r. Так как тело абсолютно твердое, то работа этой силы равна работе, затраченной на поворот всего тела. При повороте тела на бесконечно малый угол d точка приложения В проходит путь ds= rd, и работа равна произведению проекции силы на направление смещения на величину смещения:
dA=Fsinrd. (18.2) Учитывая (18.1), можем записать dA=Mzd,
где Frsin = Fl =Mz — момент силы относительно оси z. Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота.
Работа при вращении тела идет на увеличение его кинетической энергии:
dA = dT, но
![]()
Учитывая, что =d/dt, получим
![]()
Уравнение (18.3) представляет собой уравнение динамики вращательного движения твердого тела относительно неподвижной оси.
Можно показать, что если ось вращения совпадает с главной осью инерции, проходящей через центр масс, то имеет место векторное равенство
![]()
где J — главный момент инерции тела (момент инерции относительно главной оси).