

3.4 Аср стабілізації тиску газу в резервуарі
а б
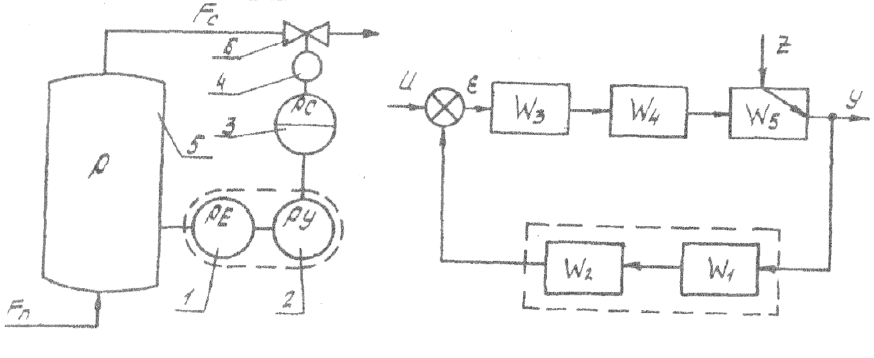
Рис. 3.5. Схема АСР тиском газу: а – функціональна;
б – структурна.
Такий об'єкт, як правило, має достатньо високу сталу і малий час чистого запізнення. Для регулювання можна використовувати як неперервні, так і позиційні регулятори. Найчастіше застосовують П- і ПІ-регулятори. Виконавчими механізмами є як пневматичні, так і електричні приводи.
Якщо регулювання здійснюється за рахунок впливу на витрати стоку Fс, як показано на рис. 3.5,а, то витрати притоку Fп будуть сильним збуренням. До значного збурюючого фактора належить також температура газу.
Система працює таким чином: зі збільшенням тиску Р у резервуарі 5 зросте сигнал у1 на виході проміжного перетворювача 2 і з'явиться сигнал неузгодженості на виході регулятора 3. Вихідний сигнал останнього почне діяти на виконавчий механізм 4 і відповідно на регулюючий орган 6, який збільшить прохідний отвір і витрати Fс, що призведе до спаду тиску до попереднього значення. Зазначимо, що датчик 1 і проміжний перетворювач 2, як правило, конструктивно об'єднані і являють собою одну динамічну ланку першого або другого порядку.
Резервуар під тиском належить до ОР першого порядку. Нехай АСР має П-регулятор, силовий вимірювальний перетворювач і циліндричний пневмопривід регулюючого клапана.
Виконавчий маханізм (пневмопривід) є інтегруючим елементом першого порядку з передаточною функцією
![]() /3.13/
/3.13/
Розглянемо АСР по каналу и→y. Передаточна функція має вигляд:
Wр(s)=
![]() /3.14/
/3.14/
Аср стабілізації температури теплообмінника
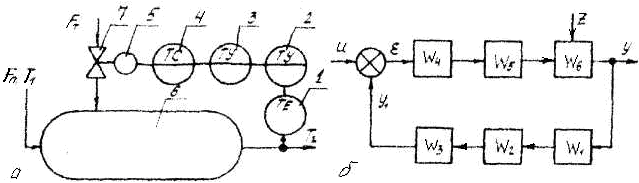
Рис. 3.6. Схеми АСР температури: а - функціональна; б - структурна
Одна з особливостей регулювання температури продукту на виході кожухотрубного теплообмінника 6 полягає в тому, що по-перше, він описується диференціальним рівнянням другого порядку, по-друге, його перехідний процес може мати коливальний характер, по-третє, теплообмінник має досить великий час чистого запізнення. Ще одна особливість полягає в тому, що первинний вимірювальний перетворювач 1 (у більшості випадків термопара) має досить великі сталі часу.
Регулювання, як правило, здійснюється за рахунок зміни витрат теплоносія FТ, яким найчастіше в хімічній технології використовуєтьcя перегріта пара. Регулятор може мати ПІ- або ПІД-закони регулювання, оскільки в більшості випадків статична похибка не допускається. Приводом до регулюючого органу 7 може бути як пневматичний мембранний виконавчий механізм, так і електродвигун. Принцип роботи АСР полягає в наступному: із підвищенням температури Т2 відносно заданого регулятором значення збільшується сигнал на виході перетворювача 1. Останній надходить на нормуючий перетворювач 2, в якому цей сигнал перетворюється на струм силою 0...5, 0...20 або 4...20 мА. Якщо для регулювання використовують пневматичний виконавчий механізм, то цей електричний сигнал за допомогою електропневматичного перетворювача 3 перетворюють на уніфікований пневматичний сигнал 0.02....0.1 МПа. Останній подається на пневматичний регулятор 4, який керує виконавчим механізмом 5. Це приведе до того, що регулюючий орган зменшить прохідний отвір, а відповідно й витрати теплоносія.
Сильними збурюючими факторами для системи регулювання є витрати продукту Fn та його температура Т1. Тому, синтезуючи АСР, необхідно дослідити їх вплав з урахуванням того, що по цих каналах спостерігається істотне запізнення.
Ураховуючи, що індекси передаточних функцій на структурній схемі відповідають позиціям функціональної схеми, передаточна функція АСР по каналу регулювання при ПІД-регулюванні має вигляд:
Wр(s)=
![]() /3.15/
/3.15/