

2.2.1 Порядок проведення роботи з інтегруючою ланкою.
Для створення моделі вибираємо необхідні блоки в бібліотеці та перетягуємо їх до робочого поля. Зауважимо, що в цьому випадку блок моделюється блоком Іntergator (а не Trancfer Fсn), бо цей блок дозволяє змінювати початкові умови інтегрування. Так як цей блок не дозволяє змінювати коефіцієнт передачі, то перед ним вмикається блок Gain. В блоці Step задаємо значення сигналу Final Value 1, а час затримки (Step Time) – 0. Значення Initial Value та Sample Time залишаємо незмінними і рівними 0.
![]()
Рисунок 2.3 - Схема моделі інтегруючої ланки
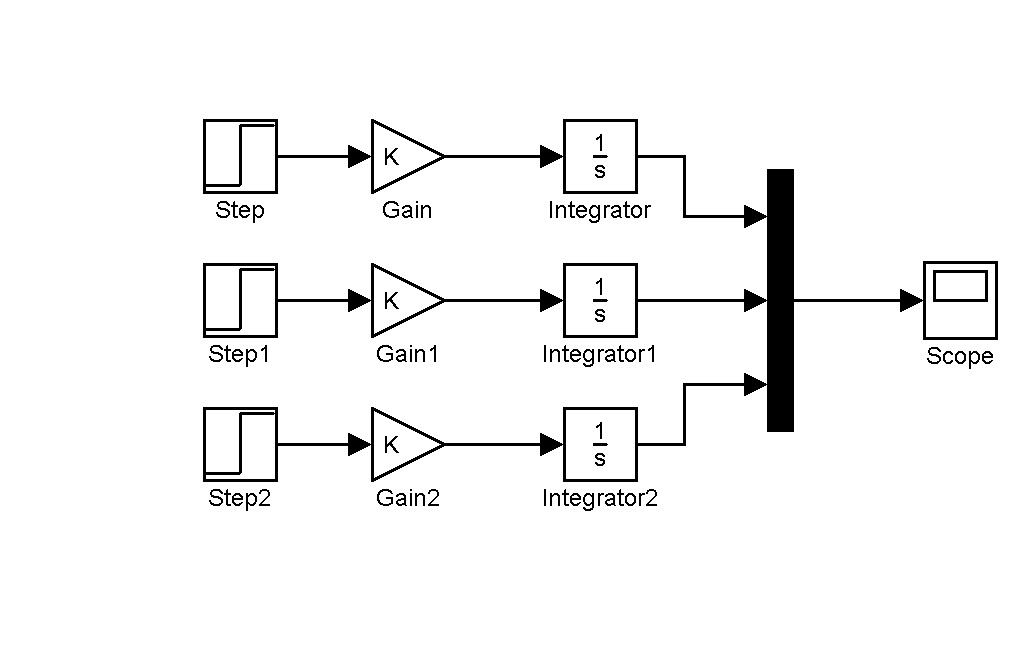
Mux
Рисунок 2.4 - Схемі інтегруючої ланки для трьох графіків
Задання параметрів здійснюється в таблиці (див. лаб. роботу №1), яка викликається подвійним кліком ЛМ на потрібному блоці. Далі встановлюється коефіцієнт К, згідно таблиці 2.1, в блоці Gain та значення у0 в полі Initial Condition блока Integrator. Значення у0 обирається згідно до завдання. Після введення параметрів в блок треба натиснути Enter або ОК ЛМ.
Далі малюємо зєднання у схемі (рекомендується малювати їх з кінця в початок).
Після створення схеми та встановлення потрібних коефіціентів в блоках потрібно задати кінцевий час моделювання tk (таблиця 2.1). Він задається в полі Simulation Simulation Parameters Stop Time.
Для полегшення роботи рекомендується створити три моделі з різними параметрами в блоках Gain для першого завдання або Integrator для другого на одному робочому полі Simulink та обєднати їх виходи через блок Мих, подати на один Scope (рис. 2.4). При цьому отримуємо всі графіки одразу на спільній координатній площині.
Натискати кнопку моделювання потрібно кожного разу після внесення будь-яких змін в модель. Подивитися результати моделювання можливо подвійним кліком ЛМ на відповідному блоці Scope. Після виконання пункту 1 завдання, перейти до пункту 2, змінивши потрібні параметри в блоках Gain та Integrator за завданням.
2.2.2. Порядок проведення роботи з інерційною ланкою
Для створення моделі вибираємо необхідні блоки в бібліотеці блоків та перетягуємо їх до робочого поля. В якості блоку обираємо блок Іntergator, так як цей блок дозволяє змінювати початкові умови інтегрування ( на відміну від Trancfer Fсn). Значення параметрів Gain, Gain 1 та Іntergator вибираємо з таблиці 2.2 та з завдання, для задання параметру треба зробити подвійний клік ЛМ на потрібному блоці. Значення блоку Step такі ж, як в моделі інтегруючої ланки.
![]()

Рисунок 2.5 - Схема моделі інерційної ланки 1-го порядку
Значення параметру блока Gain дорівнює К з таблиці 2.2 (або за завданням (для 3-го пункту завдання)), значення параметру блока Gain 1 розраховується як 1/Т, де значення постійної часу Т береться з таблиці 2.2 (або за завданням (для 1-го пункту завдання)).
Значення параметру Initial Condition блока Integrator дорівнює у0, тобто при виконанні пунктів 1 та 3 завдання – дорівнює 0, а пункту 2 – за завданням.
В блоці Sum встановлюємо параметр List of Signs як “+ – ”, що відповідає підключенню відємного зворотнього звязку.
Далі потрібно намалювати зєднання в схемі та встановити значення часу розрахунку ( tk з таблиці 2.2) аналогічно тому, як це задавалося для інтегруючої ланки.
Моделювання потрібно проводити після внесення будь-яких змін в модель.
Після виконання пукту 1 завдання перейти до пунктів 2 та3, змінивши відповідні параметри блоків Gain, Gain 1 та Іntergator.
Рекомендується також створити три моделі з різними параметрами, обєднавши їх виходи за допомогою блоку Мих, аналогічно тому, як це було зроблено при вивченні інтегруючої ланки.
Отримані результати треба подивитися, відкривши поле графіка подвійним кліком ЛМ на блоці Scope, та зафіксувати в звіті згідно завдання.
Після закінчення моделювання треба визначити з графіків перехідних процесів в інерційній та інтегруючій ланках значення К, Т, та у0 та перевірити їх відповідність завданню (див. рис. 2.1 та рис 2.2б).
2.3 Зміст звіту
Звіт повинен містити теоретичні відомості про інтегруючу та інерційну ланки, моделі, графіки перехідних процесів та висновки згідно досліджень.