

7.2.1 Хід виконання
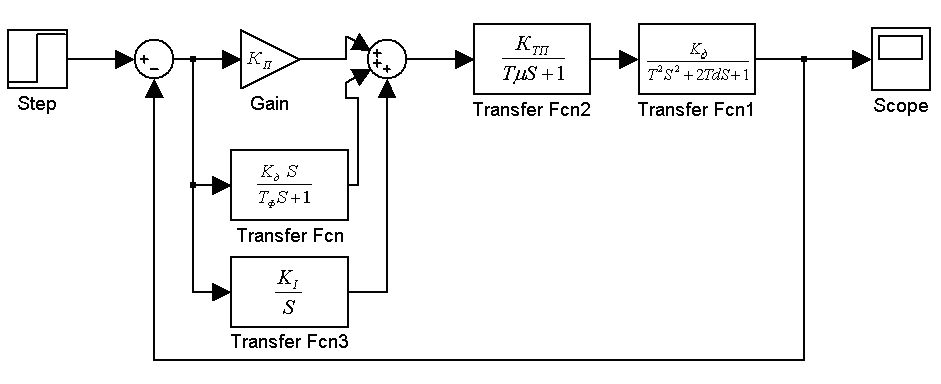
Схема моделювання системи з ПІД регулятором наведена на рис. 7.9:
![]()
Рисунок 7.9 - Схема моделювання системи з ПІД регулятором
Значення Т и d визначаються з формул:
![]() ;
;
![]() .
.
7.2.2 Зміст звіту
Зміст звіту повинен містити основні теоретичні відомості, вихідні дані, розрахунки, схеми моделей, графіки перехідних процесів розрахунки по визначенню показників якості, а також висновки щодо впливу складових частин ПІД-регулятора на перерегулювання, коливальність системи, статизм та усталене значення yуст , зроблені з вигляду перехідних процесів.
Контрольні запитання
1. Звязок між передаточною функцією ПІД-регулятора та його складових частин та виглядом перехідного процесу в ньому.
2. Що таке П-, ПІ-, ПІД- , ПД - регулятори?
3. Як впливають складові частини ПІД - регулятора на показники якості системи з ПІД - регулятором?
4. Як розрахувати параметри ПІД - регулятора при оптимізації системи за модульним оптимумом?
5. Чим відрізняються ідеальний та реальний ПІД – регулятори?
Лабораторна робота 8 Дослідження сак при наявності збурення в системі
Мета роботи: дослідження впливу збурення на САК, синтез регулятора САК за симетричним крітерієм оптимальності.
8.1 Теоретичні положення
Структурна
схема САК з наявністю невизначеного
збурення показана на рис. 8.1, де g
- вхідний сигнал , х = g - у
- помилка системи , u
-керуючий на сигнал , Wпід
(s) - передаточна функція
регулятора, Wо (s)
- передаточна функція об’єкта керування,
Wвп (s)
- передаточна функція виконавчого
пристрою ,
![]() -
збурення.
-
збурення.
![]()
Рисунок 8.1 - Структурна схема САК з наявністю невизначеного збурення
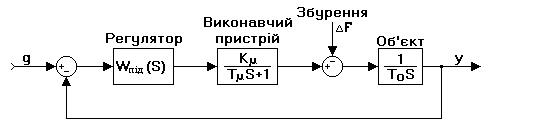
Рисунок 8.2 – Схема формування перехідного процесу в системі регулювання з регулятором
Розглянемо формування перехідного процесу в системі регулювання з регулятором (рис. 8.2), оптимізованим за так званим симетричним оптімумом. При цьому передаточна функція розімкненої системи за керуванням має вигляд:
![]()
(8.1)
а замкненої:
![]()
(8.2)
Перехідний процес в системі при цьому має вигляд (рис. 8.3):
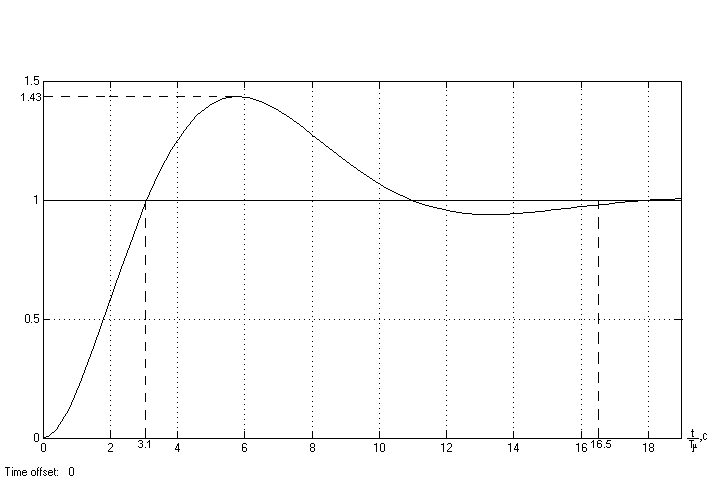
Рисунок 8.3 - Перехідний процес в системі
В такому
випадку компенсуються постійна часу
![]() ,
а
є некомпенсуємою.
,
а
є некомпенсуємою.
Для забезпечення цього передаточна функція регулятора повинна мати вигляд:
![]() (8.3)
(8.3)
Тобто в цьому випадку
![]()
(8.4)
або
![]()
(8.5)
Тобто в цьому випадку отримуємо ПІ регулятор, у якому:
![]()
![]()
Для оцінки систем керування в багатьох випадках оцінюють запаси стійкості по фазі
![]()
де
![]() - фаза сигналу на частоті зрізу
а також по амплітуді
- фаза сигналу на частоті зрізу
а також по амплітуді
![]() . Запас стійкості по амплітуді дорівнює
значенню амплітуди по ЛАЧХ в дБ при
запасі по фазі, рівному нулю.
. Запас стійкості по амплітуді дорівнює
значенню амплітуди по ЛАЧХ в дБ при
запасі по фазі, рівному нулю.
8.2 Дослідна частина
Завдання
1.Розрахувати параметри регулятора згідно рис 8.2 та даних з таблиці за симетричним оптимумом.
2.Промоделювати
перехідні процеси в системі згідно рис.
8.4 та проведених розрахунків по У при
умові
![]() та визначити показники якості.
та визначити показники якості.
3.Промоделювати
перехідні процеси в системі згідно рис.
8.4 та проведених розрахунків по У при
умові
![]() та визначити показники якості.
та визначити показники якості.
4.Промоделювати
перехідні процеси в системі згідно рис.
8.4 та проведених розрахунків та даних
з таблиці по У та визначити показники
якості. При умові
![]()
5.
Написати передаточну функцію системи
за керуванням
![]() та побудувати по ній ЛАЧХ та ЛФЧХ,
визначити по них значення запасу
стійкості по фазі та амплітуді.
та побудувати по ній ЛАЧХ та ЛФЧХ,
визначити по них значення запасу
стійкості по фазі та амплітуді.
6.
Написати передаточну функцію системи
за збуренням
![]() та побудувати по ній ЛАЧХ та ЛФЧХ,
визначити по них значення запасу
стійкості по фазі та амплітуді.
та побудувати по ній ЛАЧХ та ЛФЧХ,
визначити по них значення запасу
стійкості по фазі та амплітуді.
Примітка. Вхідний сигнал дорівнює одиниці, якщо не задано інакше, початкові умови – нульові, час розрахунку обрати самостійно.
Таблиця 8.1 – Таблиця варіантів
Дані / Варіанти |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
Постійна часу
виконавчого пристрою (некомпесуйома
постійна часу),
|
3 |
2 |
3 |
1 |
2 |
3 |
1 |
0.5 |
1.0 |
1.7 |
1.6 |
1.5 |
1.4 |
1.3 |
Коефіцієнт
виконавчого пристрою,
|
12 |
25 |
50 |
10 |
20 |
15 |
70 |
20 |
25 |
30 |
35 |
40 |
45 |
50 |
Постійна часу
обєкта (компесуєма постійна часу),
|
8 |
6 |
5 |
4 |
7 |
8.5 |
10 |
8 |
7 |
5 |
6 |
8 |
10 |
5 |
Збурення, |
11 |
12 |
6 |
7 |
2.5 |
10 |
30 |
3 |
5 |
2 |
7 |
8 |
9 |
10 |