

6.2 Дослідна частина
Завдання
Користуючись моделлю САК (рис.6.3) та даними з таблиці 6.1, побудувати перехідні процеси в системі при =0.001;0.5(Т1+Т2);(Т1+Т2) на спільній координатній площині.
Побудувати ЛАЧХ та ЛФЧХ розімкненої системи при =0.001;0.5(Т1+Т2);(Т1+Т2) на спільній координатній площині.
Побудувати залежність запасу сталості по фазі від значення ..
Розрахувати значення кр. Промоделювати систему з кр.
Примітка. Вхідний сигнал обрати рівним одиниці, початкові умови - нульові.
6.2.1 Хід роботи
Ввести модель САК (рис.6.3).
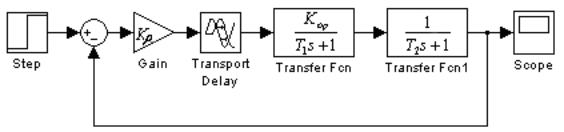
Рисунок 6.3 - Модель САК з наявністю чистого запізнювання в об’єкті.
Таблиця 6.1 – Вихідні дані
Варіант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
Kp |
11 |
6,5 |
12 |
4 |
2 |
5 |
6 |
10 |
3,5 |
5,2 |
4 |
2 |
3 |
Kop |
0,1 |
0,2 |
0,09 |
0,3 |
0,6 |
0,22 |
0,2 |
0,125 |
0,3 |
0,22 |
0,3 |
0,6 |
0,4 |
,c |
За завданням |
||||||||||||
T1 |
0,2 |
0,25 |
0,3 |
0,25 |
0,35 |
0,2 |
0,25 |
0,3 |
0,2 |
0,1 |
0,15 |
0,15 |
0,05 |
T2 |
0,2 |
0,15 |
0,2 |
0,25 |
0,25 |
0,25 |
0,15 |
0,15 |
0,2 |
0,3 |
0,25 |
0,3 |
0,35 |
Stop time |
4 |
4 |
6 |
6 |
7 |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
При вводі моделі потрібно звернути увагу на параметри блока Transport delay. В процесі роботи буде змінюватися лише параметр – значення чистого запізнювання Time delay. Інші параметри блока задаються при створені моделі.
Параметр |
Значення |
Time delay |
, с |
Initial input |
0 |
Initial buffer size |
1024 |
Pade order |
4 |
Після створення моделі потрібно задати значення Stop time, промоделювати та зафіксувати у звіті отриманий перехідний процес, після повторити моделювання з іншими значеннями (за завданням) =0; 0.5(Т1+ Т2); (Т1+ Т2).

Рисунок 6.4 - Модель САК для зняття частотних характеристик
Виконавши моделювання та зафіксувавши згідно завдання його результати, змінюємо модель (рис. 6.4) для побудови ЛАЧХ и ЛФЧХ розімкненої системи. Далі будуємо ЛАЧХ і ЛФЧХ розімкненої системи при =0; 0.5(Т1+Т2); (Т1+Т2), аналогічно тому, як це робиться в лабораторній роботі № 3. Зафіксувати їх у звіті на спільній координатній площині, з’ясувати значення логарифма частоти зрізу lg(c) та фази на частоті зрізу с при =0 (згідно рис. 6.2).
Далі треба з’ясувати, користуючись критерієм Найквіста, значення критичного запізнювання кр та з’ясувати по ЛФЧХ запас сталості по фазі на частоті зрізу при значеннях =0.001(0), 0.5(Т1+ Т2), (Т1+ Т2). Заповнити таблицю 6.2 та побудувати залежність = ().
Таблиця 6.2 – Залежність запасу сталості по фазі відзначення запізнювання
|
0 |
0.5(Т1+ Т2) |
(Т1+ Т2) |
кр |
, с |
0 |
|
|
|
, |
|
|
|
0 |
Зробити висновок про характер впливу чистого запізнювання в об’єкті на якісні показники САК .
2.2 Зміст звіту
Звіт повинен містити теоретичні відомості, моделі системи графіки перехідних процесів, частотні характеристики, розрахунки значення кр, таблицю 6.2, графік залежності = () та висновки згідно досліджень.
Контрольні запитання
1. Зв’язок між диференційними рівняннями та передаточними функціями системи при наявності запізнювання.
2. Вплив запізнювання на вигляд перехідного процесу в системі.
3. Вплив запізнювання на вигляд частотних характеристик.
4. Що таке критичне запізнювання та як знайти його значення, використовуючи критерій Найквіста.
Лабораторна робота 7
Дослідження САК з ПІД – регулятором
Мета роботи: дослідження складових частин ПІД регулятора, дослідження впливу на показники якості складових ПІД – регулятора.
7.1 Теоретична частина
Структурна схема САК з ПІД - регулятором показана на рис. 7.1, де g - вхідний сигнал , х = g - у - помилка системи , u - керуючий сигнал , Wпід(S) - передаточна функція ПІД –регулятора, Wо (s) - передаточна функція посилювача потужності, виконавчого органу та об’єкта керування.
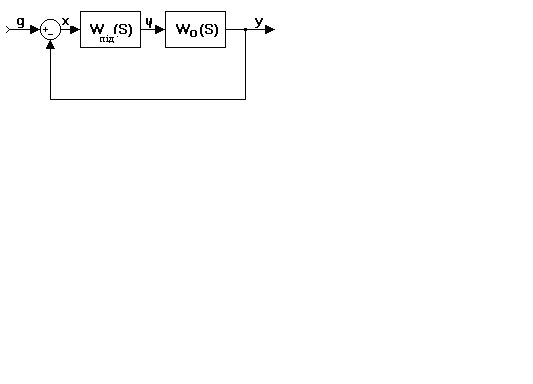
Рисунок 7.1 – Структурна схема САК з ПІД - регулятором
Передаточна функція ідеального ПІД - регулятора має вигляд:
![]() (7.1)
(7.1)
При цьому перше складове являє собою пропорційну ланку(П), друге складове - інтегруючу ланку (І), третє складове - диференціюча ланка (Д). На підставі цього регулятор має назву ПІД - регулятор. Існують також П-, ПІ-, та ПД- регулятори, структура яких складається відповідно до відомостей , наведених вище.
Структурна схема ідеального ПІД - регулятора має вигляд (рис. 7.2):
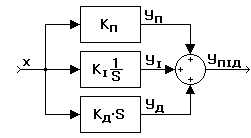
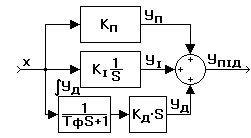
Рисунок 7.2 Рисунок 7.3
Для
покращення завадозахищеності на практиці
третє складове у змінюють на
диференцюючу ланку з уповільненням
![]() . Тоді реальний ПІД - регулятор має вигляд
(рис. 7.3):
. Тоді реальний ПІД - регулятор має вигляд
(рис. 7.3):
![]() (7.2)
(7.2)
При цьому перехідний процес у П-частині при одиничному вхідному сигналі має вигляд (рис. 7.4):
![]()
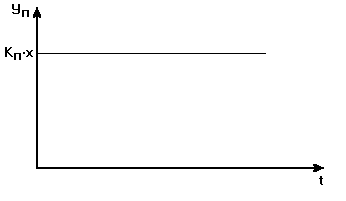
Рисунок 7.4 – Перехідний процес у П-частині при одиничному вхідному сигналі
Включення П-частини дозволяє зменшити статичну помилку та час перехідного процесу.
Перехідний процес у І-частині при одиничному вхідному сигналі має вигляд (рис. 7.5):
![]()
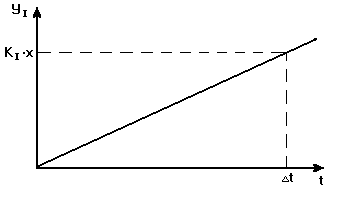
Рисунок 7.5 – Перехідний процес у І-частині при одиничному вхідному сигналі
Включення І-частини дозволяє зробити систему астатичною.
Перехідний процес у Д-частині реального ПІД-регулятора при одиничному вхідному сигналі має вигляд (рис. 7.6):
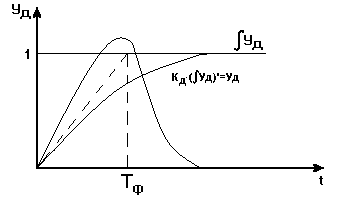
Рисунок. 7.6 – Перехідний процес у Д-частині реального ПІД-регулятора
Він є похідною сигнала на виході апериодичної ланки, яка включається в ПІД-регулятор для покращення завадозахищенності.
Включення Д-частини дозволяє зменшити швідкісні помилки.
Загальний перехідний процес в ПІД-регуляторі є сумою процесів в П, І та Д-частинах.
Розрахунок коефіцієнтів ПІД-регулятора у багатьох випадках проводять з огляду на те, щоб передаточна функція замкненї системи та перехідний процес мали наперед заданий вигляд.
Наприклад, розглянемо формування перехідного процесу в контурі регулювання швидкості двигуна постійного струму з ПІД-регулятором (рис. 7.7) за так званим модульним оптімумом. При цьому передаточна функція розімкненої системи має вигляд:
![]() (7.3)
(7.3)
а замкненої:
![]() (7.4)
(7.4)
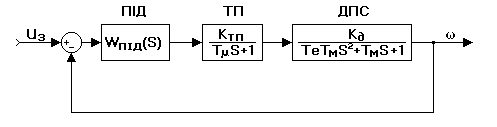
Рисунок 7.7 – Перехідний процес в контурі регулювання швидкості двигуна постійного струму з ПІД-регулятором
Перехідний процес в системі при цьому має вигляд (рис. 7.8):
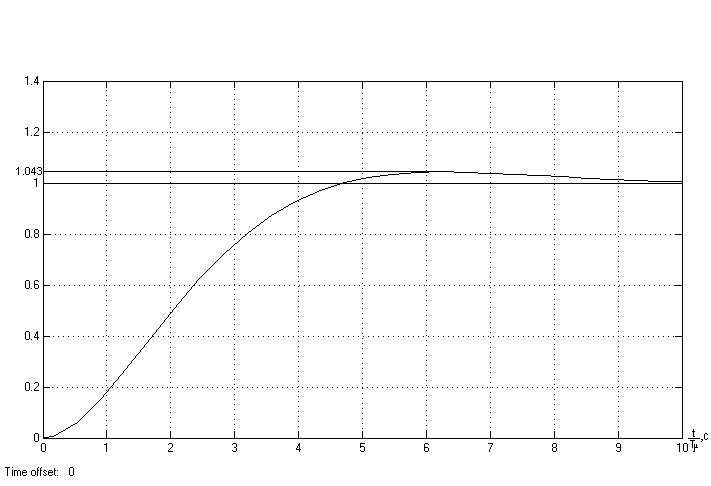
Рисунок. 7.8 – Перехідний процес в системі
В такому
випадку компенсуються постійні часу
![]() та
та
![]() , а
, а
![]() є некомпенсуємою. Для забезпечення
цього передаточна функція ПІД-регулятора
повинна мати вигляд:
є некомпенсуємою. Для забезпечення
цього передаточна функція ПІД-регулятора
повинна мати вигляд:
![]()
(7.5)
![]() (7.6)
(7.6)
Тобто:
![]() ;
;
![]() ;
;
![]() , при
, при
![]() (7.6)
(7.6)