

4.2.1 Хід виконання
4.2.1.1. Ввести модель згідно з рис. 4.3. Значення коефіцієнтів задавати у відповідності до структурної моделі рівняння третього порядку (рис.4.2). Значення вхідного сигналу задати рівним одиниці.
4.2.1.2. Перейти в режим вибору параметрыв моделювання та задати кінцевий час розрахунку Stop time (згідно таблиці 4.1).
4.2.1.3. Виконати розрахунок, зняти графік процесу по у до звіту, потім на ту ж координатну площину зняти графік по y’ (згідно структурної схеми (рис. 4.2)).
4.2.1.4. Побудувати фазовий портрет, перенести його в звіт
4.2.1.5. Змінити параметри моделі згідно таблиці 4.1 та знову виконати п.п.4.2.1.2.-4.2.1.4.
4.2.2 Зміст звіту
Зміст звіту повинен містити основні теоретичні відомості, графіки перехідних процесів по у та y’ на спільній координатній площині для першого і другого випадків, фазові портрети для першого і другого випадків, а також висновки щодо стійкості системи у першому та другому випадках, зроблені з вигляду перехідних процесів, фазових портретів та за критерієм Рауса-Гурвіца.
Контрольні запитання
Як за диференційним рівнянням скласти структурну схему системи та навпаки?
Як за коефіцієнтами диференційного рівняння визначити стійкість системи 3-го порядку?
Як за виглядом фазового портрета визначити стійкість системи?
Як складається визначник Рауса-Гурвіца?
В якому випадку, за критерієм Рауса-Гурвіца, система буде стійкою?
Лабораторна робота 5
Дослідження впливу гнучкого зворотного зв’язку
на якісні показники САК
Мета роботи:
-Отримати навички експериментального визначення показників якості.
-Вивчити вплив гнучкого зворотного зв’язку на якісні показники САК.
5.1 Теоретична частина
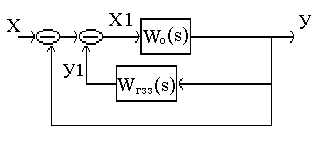 На рис. 5.1 наведена структурна схема
системи , що досліджується, де x- вхідний
сигнал, x1= x - y - y1 , ГЗЗ - гнучкий зворотний
зв’язок.
На рис. 5.1 наведена структурна схема
системи , що досліджується, де x- вхідний
сигнал, x1= x - y - y1 , ГЗЗ - гнучкий зворотний
зв’язок.
Рисунок 5.1 - Структурна схема системи.
В цій системі
![]()
![]() (5.1)
(5.1)
![]() (5.2)
(5.2)
Гнучкий
зворотній зв’язок – це зв’язок, який
діє лише під час перехідного процесу і
не впливає на усталене значення сигналу
на виході системи. В ГЗЗ ланка
![]() є інерційною ланкою, яка має добрі
фільтруючі властивості. Ця ланка введена
для підвищення завадозахищенності, яка
погіршується за рахунок ланки
є інерційною ланкою, яка має добрі
фільтруючі властивості. Ця ланка введена
для підвищення завадозахищенності, яка
погіршується за рахунок ланки
![]() (див. (5.2)). Виходячи з (5.1) , об’єкт
регулювання слід моделювати трьома
послідовно з’єднаними інерційними
ланками (див. лабораторну роботу 2). При
нульових початкових умовах перехідний
процес по вихідній координаті у має
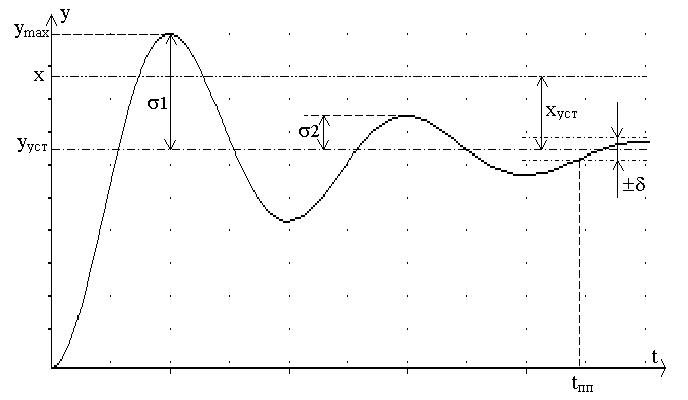
вигляд, який наведено на рис. 5.2.
(див. (5.2)). Виходячи з (5.1) , об’єкт
регулювання слід моделювати трьома
послідовно з’єднаними інерційними
ланками (див. лабораторну роботу 2). При
нульових початкових умовах перехідний
процес по вихідній координаті у має
вигляд, який наведено на рис. 5.2.
При цьому yуст- усталене значення вихідної змінної у, 1= ymax - yуст - абсолютне перерегулювання, xуст=x-yуст - помилка системи, що встановилася. Процес вважається завершеним з того часу, коли коливання змінної безповоротно увійдуть до зони yуст. Значення обирають, виходячи з вимог до системи регулювання. Для грубих систем обирають = 0.05 yуст.
За характером перехідного процесу можна визначити деякі показники якості системи.
Час перехідного процесу tпп - проміжок часу від початку перехідного процесу до того часу , коли коливання остаточно увійдуть у зону , що була визначена попередньо відносно нового значення yуст.
Відносне перерегулювання =1/ yуст. Система вважається доброю , якщо =0.1,... , 0.3 .
Затухання протягом періоду =(1 -2)/1 . Система вважається доброю, якщо = 0.9, ... , 0.98.
Коливальність М дорівнює кількості перерегулювань за час перехідного процесу tпп.
Статизм системи = xуст /x= 1/ (1+ К) , де К- коефіцієнт передачі системи в усталеному режимі. Для з’ясування К треба в передаточній функції системи дорівняти значення оператора Лапласа нулю (s=0), тобто
![]()
 ,
де s=0
,
де s=0
Рисунок 5.2 - Вигляд перехідного процесу в системі
та визначення показників якості.