

2.1 Теоретична частина
Інтегруюча ланка.
Інтегруючий елемент описується рівнянням
![]() ,
або
,
або
![]() ,
,
де x, y – вхідний та вихідний сигнали,
Т – стала часу,
у0 – початкова умова.
Передаточна функція інтегруючої ланки має вигляд:
![]() ,
,
де s – оператор Лапласа.
При цьому
![]()
Значення K можна з`ясувати по вигляду перехідного процесу, як співвідношення зміни вихідного сигналу до множини часу, за який вона сталася, і вхідного сигналу (рис 2.1).
![]() ,
,
де
![]() у-
зміна вихідного сигналу;
у-
зміна вихідного сигналу;
t- зміна часу.
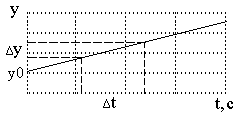
Рисунок. 2.1 - Перехідний процес в інтегруючий ланці
При нульових початкових умовах графік перехідного процесу в інтегруючий ланці є прямою, яка починається з початку координат. Якщо y00, початок графіку змінюється по у на величину у0.
Інерційна ланка 1-го порядку.
Рівняння, яким описується інерційна ланка 1-го порядку, має вигляд:
![]() , (2.1)
, (2.1)
де х,у – вхідний та вихідний сигнали,
Т –стала часу,
К – коефіцієнт передачі.
Рівнянню (2.1) відповідає передаточна функція
![]() ,
(2.2)
,
(2.2)
де X(s) , Y(s) – перетворені за Лапласом х та у.
Для встановлення зв’язку між (2.1) та (2.2) у (2.2) X(s) та Y(s) змінено на х та у, з урахуванням, що s- оператор диференціювання по часу, тобто
![]() ,
,
Створимо структурну схему методом пониження порядку старшої похідної .
З (2.1) витікає:
![]() ,
або
,
або
![]() (2.3)
(2.3)
Можна записати
![]() або
або ![]() .
.
Тоді
![]() .
(2.4)
.
(2.4)
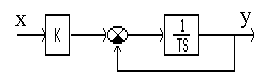
У відповідності до (2.4) та (2.3) структурна схема ланки має вигляд (рис 2.2а)
а) б)
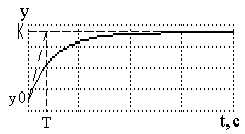
Рисунок.2.2 -Структурна схема інерційної ланки 1-го порядку (а)
та перехідний процеси в ній (б).
Таким чином, інерційна ланка являє собою інтегруючу ланку, охоплену одиничним зворотним зв’язком. Вигляд перехідного процесу в інерційній ланці наведений на рис.2.2б. У відповідності до нього при одиночному вхідному сигналі, усталене значення дорівнює К, а довжина проекції дотичної до початку графіка від початку до точки перехрещення дотичної з лінією усталеного значення - Т.
2.2 Дослідна частина.
Завдання
Інтегруюча ланка.
1. Побудувати графіки перехідних процесів в інтегруючий ланці по моделі (рис.2.3) згідно з даними з таблиці 2.1 при К=К; 1.5К; 2К, при нульових початкових умовах (у0=0) на спільній координатній площині.
2. Побудувати на спільній координатній площині графіки перехідного процесу в інтегруючий ланці при К=К та у0=0,5; 1; 1,5.
Інерційна ланка 1-го порядку.
1. Побудувати графіки перехідних процесів в інерційній ланці 1-го порядку згідно моделі (рис 2.5), використовуючи дані з таблиці 2.2 при Т=Т; 0.5Т; 0,25Т при у0=0 та К=К на спільній координатній площині.
2. Побудувати графіки перехідних процесів в інерційній ланці 1-го порядку згідно моделі (рис. 2.5), використовуючи дані з таблиці 2.2 при Т=Т, К=К та у0 = 0; 1,5; 5 на спільній координатній площині.
3. Побудувати графіки перехідних процесів в інерційній ланці 1-го порядку згідно моделі (рис. 2.5), використовуючи дані з таблиці 2.2 при К=К; 1,5К; 2К при Т=Т, у0=0 на спільній координатній площині.
4. З графіків перехідного процесу інерційної ланки визначити К та Т і перевірити їх відповідність завданню.
Примітка.У всіх випадках значення вхідного сигналу дорівнює одиниці.
Таблиця 2.1 - Вихідні дані для моделювання інтегруючої ланки.
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
К |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
Stop time |
2 |
2 |
2 |
1.5 |
1 |
1 |
1 |
0,5 |
0,5 |
0,5 |
0,5 |
0,5 |
0,5 |
Таблиця 2.2 - Вихідні дані для моделювання інерційної ланки.
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
К |
2 |
2,5 |
3 |
3,5 |
4 |
2 |
2,5 |
3 |
3,5 |
4 |
2 |
2,5 |
3 |
3,5 |
4 |
Т,с |
0.5 |
0.5 |
0.5 |
0.5 |
0.5 |
1.0 |
1.0 |
1.0 |
1.0 |
1.0 |
2.0 |
2.0 |
2.0 |
2.0 |
2.0 |
Stop time |
3 |
3 |
3 |
3 |
3 |
6 |
6 |
6 |
6 |
6 |
12 |
12 |
12 |
12 |
12 |