

Роздділ сьомий
7. Автоматичні електронні системи керування автомобілем Призначення електронних систем керування
Покращення характеристик джерел енергії, трансмісії, неелектронних систем керування та безпеки руху. Зниження собівартості експлуатаційних витрат та покращення екологічних показників автомобіля.
Вимоги:
Покращення характеристик керованих елементів автомобіля за рахунок застосування електронних систем керування.
Забезпечення безпеки руху та комфортного керування.
Забезпечення слідкуючої дії, мінімального часу спрацювання, та можливість керування автомобілем при відмові автоматичної системи керування.
Класифікація електронних систем керування:
За об’єктом керування:
Двигуном внутрішнього згоряння бензиновим двигуном, дизелем або електродвигуном.
Трансмісією (Зчепленням, автоматичною коробкою передач, роздавальною коробкою, міжосьовим та міжколісним диференціалами).
Ходовою системою (Підвіска, колеса).
Гальмівною системою (Забезпеченням безпеки руху та використанням кінетичної енергії гальмування).
Рульовим керуванням (Забезпеченням безпеки руху).
Обладнанням салону.
За технологією виготовлення, призначенням, конструкцією та принципом дії датчиків.
За способом приводу системою виконавчих механізмів:
Гідравлічним.
Електрогідравлічним.
Електричним.
Електропневматичним.
За способом керування системою:
Неавтоматичні, які вступають у дію після отримання сигналу від водія.
Автоматичні без участі водія.
За можливістю керування одним, декількома виконавчими механізмами, або автомобілем у цілому:
Системи, що керують одним виконавчим механізмом і можуть використовувати датчики інших систем у своїй роботі.
Системи, які працюють комплексно з іншими системами, можуть передавати їм сигнали до виконання та забезпечують автоматичний рух автомобіля.
Конструкція електронних систем керування
Набір датчиків, електронні блоки керування (ЕБК) та комплект виконавчого обладнання.
Принцип дії
Усі електронні системи керування автомобіля мають загальний принцип роботи.
Незважаючи на те, що усі вузли та агрегати виконують різні функції та неоднакові по конструкції, принципова будова та принцип дії електронних систем керування ідентичний. Датчики системи зчитують необхідну інформацію і передають в електронний блок керування. Аналогова інформація, що поступила від датчиків, переводиться у цифрову форму з допомогою вбудованого аналого - цифрового перетворювача. Електронний блок керування на основі мікропроцесора виконаний повністю цифровим. Отримані данні обробляються з допомогою алгоритма, закладеного у мікропроцесор, який визначає перелік необхідних дій та подає сигнал на виконавче обладнання.
7.1. Органи керування

Рис. 7.1. Подвійна електронно важільна система керування зміною напряму руху, гальмами, двигуном та трансмісією автомобіля Mercedes F200 та дизайн салону

Рис. 7.2. Подвійне електронне важільне керування"By-wire" зміною напряму руху, гальмами, двигуном, трансмісією та дизайн салону

Рис. 7.3. Подвійне електронне важільне керування"By-wire" зміни напряму руху, гальмами, двигуном, трансмісією та дизайн салону

Рис. 7.4. Електронне штурвальне керування"By-wire" зміни напряму руху автомобіля, гальмами, двигуном тощо та дизайн салону

Рис. 7.5. Електронне штурвальне керування зміною напряму руху, гальмами, двигуном автомобіля компанії GM та дизайн салону
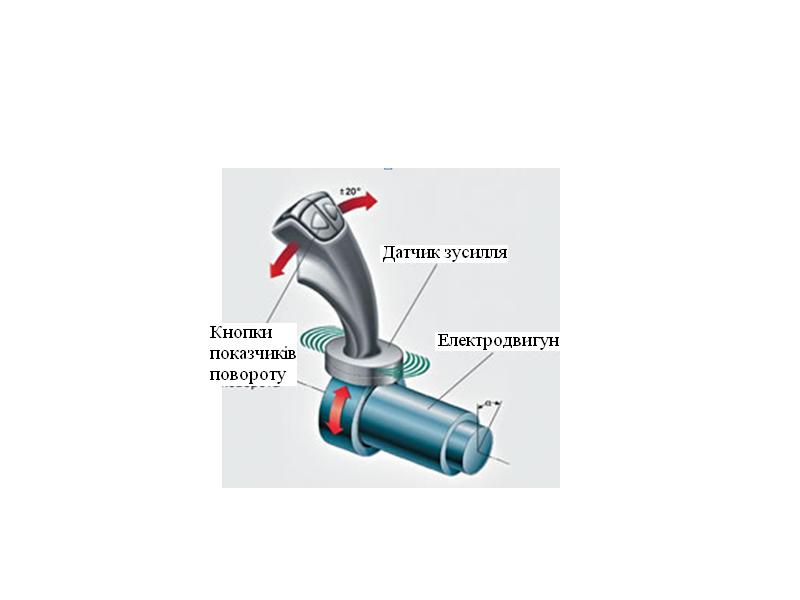
Рис. 7.6. Конструкція важіля рульового керування, що може змінювати своє положення до 200 у різні сторони при зміні напряму руху

Рис. 7.7. Штурвалне керування зміною напряму руху, гальмами, двигуном, тощо компанії GM Hy-Wire, Citroen

Рис. 7.8. Електронне штурвальне керування напрямом руху, гальмами та двигуном компанії GM

Рис.7.9. Електронне керування штурвального типу зміною напряму руху, гальмами, двигуном, тощо автомобіля Мерседес