

6.1. Схеми способів рульового керування
Найбільше розповсюдження в конструкції автомобіля отримали рульові керування з поворотом кожного з керованих коліс в горизонтальній площині навколо своєї осі. Для синхронізації повороту, керовані колеса однієї осі з’єднані шарнірно рульовою трапецією. Рульова трапеція забезпечує поворот правих та лівих коліс на різні кути, що дозволяє їм рухатися з різними радіусами без проковзування. Перевагами такого способу є те, що колеса займають при повороті малий об’єм всередині кузова, що дозволяє розташовувати рядом з колесами двигун, агрегати трансмісії тощо. Близьке розташування колеса до осі повороту зменшує ударні навантаження на рульове колесо. У двоосного автомобіля, як правило, керовані колеса передні. Маневреність автомобіля покращується, якщо двоосний автомобіль має всі керовані колеса, але це значно ускладнює конструкцію.
Поворот керованої осі. На сьогоднішній день такий спосіб використовується тільки на причепах.
Принцип повороту шляхом складання рами використовується при великих розмірах коліс.
Несуча система складається з двох частин і поєднана вертикальним шворнем та гідроциліндрами, за допомогою котрих здійснюється поворот. Застосовується в основному на тихохідних транспортних засобах.
Силовий спосіб повороту аналогічний способу повороту гусеничного транспортного засобу. При цьому коли пригальмовуються колеса однієї сторони, колові сили коліс створюють крутний момен, що повертає автомобіль навколо вертикальної осі. Такий спосіб повороту майже не застосовується через складність трансмісії, зниження ресурсу роботи шин, неточне керування на великих швидкостях та значні витрати енергії двигуна на привід рульового керування.

Рис. 6.2. Рульове керування з приводом на передні колеса автомобіля Auris Toyota
Електропідсилювач рульового керування (EPS) вбудований у рульову колонку.
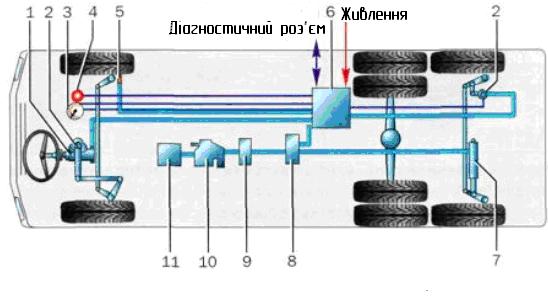
Рис. 6.3. Рульове керування з приводом передніх та задніх керованих коліс:
1-рульовий механізм; 2- датчик кута повороту рульового колеса; 3- датчик частоти обертання колінчастого вала; 4- лампа аварійної сигналізації;
5- датчик частоти обертання колеса; 6- електронний блок керування;
7- гідроциліндр; 8- керуючий клапан; 9- фільтр; 10- насос; 11- масляний бак;
У такій конструкції використовується електронний блок керування, один гідронасос, по одному силовому гідроциліндру для керування передніми та задніми колесами.

Рис. 6.4. Способи повороту:
а) - за рахунок повороту осі; б) - за рахунок повороту керованих коліс;
в) - за рахунок складання рами; г) - силовим способом

Рис. 6.5. Рульове керування з поворотом коліс двох передніх осей автомобіля МАЗ-543

Рис. 6.6. Поворот за допомогою складання рами

Рис. 6.7. Рульове керування усіма колесами активного причепа автомобіля БАЗ

Рис. 6.8. Автомобіль-тягач з керованими колесами двох передніх осей та причеп зі всіма керованими колесами
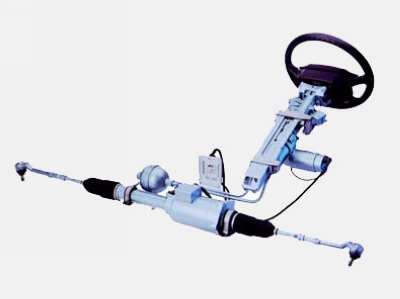
Рис. 6.9. Рульове керування без механічного зв’язку рульового колеса з керованими колесами (Steering by Wire)

Рис. 6.10. Активне рульове керування автомобіля БМВ 5 з рейковим рульовим механізмом з гідропісилювачем, планетарним редуктором, електродвигуном у розрізному приводному валу:
1 – рульовий вал; 2 – епіциклічна шестірня; 3 – сателіт; 4 – черв’ячна шестірня електродвигуна; 5 – електродвигун; 6 – аварійний фіксатор;
7 – ведуча шестірня рульового механізму; 8 – рейка рульового механізму.