

1.3. Импульсные когерентные доплеровские измерители
Применяемые импульсные когерентные измерители можно рассматривать как измерители непрерывного излучения с «вырезками» сигнала. Такой режим работы соответствует режиму квазинепрерывного излучения сигналов. Основной особенностью этого режима является малая скважность импульсов. Его применение, как и режима непрерывного излучения, позволяет эффективно использовать мощность и одновременно обеспечить возможность работы на одну антенну.
На рис. 6 приведена структурная схема типового квазинепрерывного когерентного доплеровского измерителя (для одного луча).
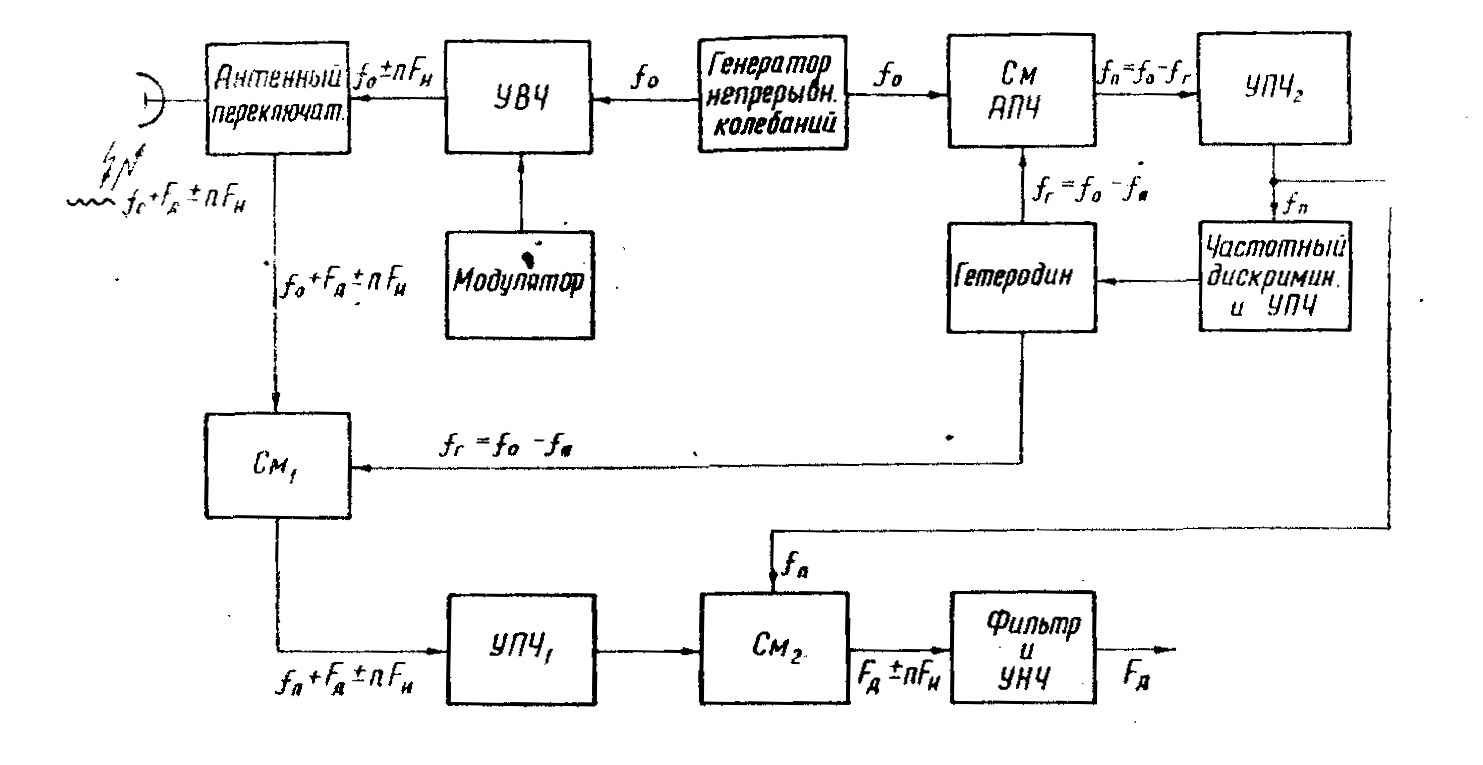 Рис.
6
Рис.
6
Генератор непрерывных колебаний формирует гармонический сигнал частоты f0. С помощью модулятора формируются прямоугольные импульсы длительностью τи и частотой повторения Fи которые модулируют колебания УВЧ генератора (см. спектр Sи (f) на рис. 7). Эти колебания излучаются. На время излучения зондирующего импульса приемник запирается и тем самым уменьшается вредное влияние шумов просочившегося сигнала. Отраженные импульсные сигналы, принятые, например, по переднему лучу приемной антенны с частотой fо + Fд ± nFи (см. рис. 6 и 7), поступают на смеситель См1. С выхода См1 сигнал частоты fп + Fд ± nFи представляющий собой результат биений принятого сигнала и сигнала гетеродина частоты fг = f0 – fп, усиливается УПЧ1. Для жесткой привязки частоты гетеродина к частоте излучения используется система АПЧ, включающая смеситель АПЧ, УПЧ2 и частотный дискриминатор с фильтром. С выхода смесителя См2 колебания различных комбинационных частот, в том числе и доплеровских частот Fд, поступают на полосовой фильтр УНЧ. Полосовой фильтр УНЧ предназначен для выделения спектра полезного доплеровского сигнала. Как видно из рис. 7, спектр Sд (f) сигнала на выходе смесителя См2 имеет составляющие в области нулевых частот, которые обусловлены низкочастотными шумами смесителя, вибрациями, биениями от различных отражателей, расположенных на одной дальности, но под разными углами в пределах луча, и т. п. Помимо этого, составляющие спектра отраженного сигнала концентрируются в областях частот nFи и Fд ± nFи .
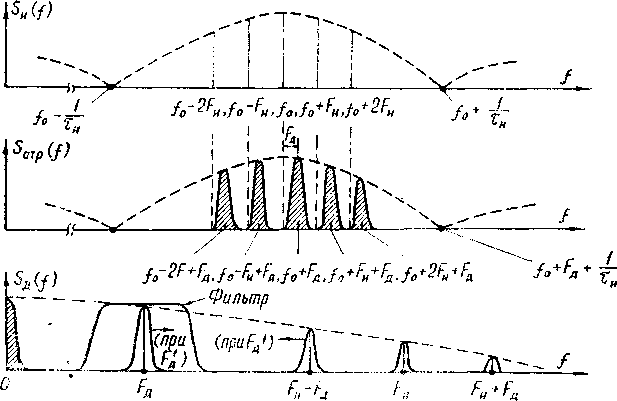
Рис. 7
Примером измерителя с квазинепрерывным режимом излучения является ДИСС типа АN/АРN-131, разработанный фирмой Laboratory Electroniec (США). В состав аппаратуры АМ/АРМ-131 входят вычислитель и индикатор географических координат ЛА. Аппаратура устанавливается на самолетах. Помимо вычисления Vп и α
в ней измеряется вертикальная составляющая скорости.
Преимущества рассматриваемого типа ДИСС состоят в том, что в них:
1. Обеспечивается лучшая развязка приемника от прямых просочившихся сигналов передатчика за счет возможности запирания приемника на время излучения сигнала.
2. Обеспечивается излучение и прием сигналов с помощью одной антенны.
3. Квазинепрерывные ДИСС работают обычно с малой скважностью
Q = T и / τи (2 - 4). Спектр принимаемых сигналов сосредоточен в узком диапазоне частот около несущей частоты. Поэтому, несмотря на неполное использование мощности отраженного сигнала в таких измерителях (так как узкополосный фильтр УНЧ выделяет только составляющие в области Fдо), они по своим энергетическим характеристикам приближаются к измерителям с непрерывным излучением, так как мощность других составляющих спектра быстро убывает.
Недостатками квазинепрерывных ДИСС являются:
1. Возможность неоднозначного измерения Fдо, а следовательно, и путевой скорости ЛА. Как следует из рис. 7, при увеличении путевой скорости Vп составляющие спектра Fдо перемещаются по оси частот вправо, а составляющие спектра в области частоты Fи — Fдо — влево. При определенных значениях скоростей Vп составляющие этих спектров могут наложиться, что приведет к неоднозначности измерений. Поэтому должно выполняться соотношение Fд о max ≤ Fи — Fдо max
Следовательно, Fи ≥ 2 Fдо max
2. Возможность появления «слепых» высот, на которых измерения невозможны. На этих высотах моменты приема отраженных сигналов совпадают с моментами излучения импульсов. «Слепыми» будут те высоты, для которых время распространения импульсов от самолета до земли и обратно кратно периоду повторения импульсов, т. е. k Ти = τ3 = 2 D / с. Со «слепыми» высотами борются путем соответствующего изменения частоты следования импульсов Fи.
3. Высокие требования к стабильности частоты передатчика (такие же, как в ДИСС с непрерывным излучением).
4. Плохая работа измерителя на малых высотах. Для обеспечения работы на очень малых высотах требуется уменьшать длительность импульсов и увеличивать частоту их повторения. В этом случае работа измерителя ведется по фронту отраженного импульсного сигнала, пока время запаздывания больше времени нормализации приемника и обеспечивается необходимое отношение сигнал/шум.