

6.Робота бортових апаратури кру.
Бортова апаратура КРУ може працювати в кожному з 4-х режимів по прийому команд наведення (АЛМ, Бр, СПК-68, СПК-75). Ці режими можуть оперативно перемкнуться льотчиком з пульта керування. Канал активної запиту-відповіді включений постійно.
а) Робота в режимі СПК-75.
Приймач СПК-75(бл. 38м) одночасно підключений до носових, хвостових і бічних антен, які забезпечує можливість надійного кругового огляду прийому сигналів від наземних станцій.
У режимі СПК-75 сигнал від наземних станцій надходить по наступній циклограмі:
Спочатку проходить адресно-запитный сигнал (АЗС) - (3 групи по 4 імпульси) після декодування яких виріб через передавач АОС видає наземним станціям адресно-відповідный сигнал, після одержання якого наземні станції видають на борт команди наведення. Сигнали команд наведення від наземних станцій приймаються АФС і передаються на ПРМ СПК (бл. 38м), де підсилюються, нормалізуються по амплітуді й далі передаються на шифратор (бл. 10). Звідки у вигляді 32 розрядних слів сформовані слова перетворяться в бінарний сигнал і видаються в ПНК й у сполучні вироби. Дешифратор інформації крім зазначених вище сигналів виробляє й видає через ДШ САЗО на «С-69» сигнали «»Виклик №», «Виклик н», а також команду «Скидання».
б) Робота в режимі СПК-68.
Робота в даному режимі (за принципом дії) аналогічна роботі в режимі СПК-75.
в) Робота в режимах «АЛМ» й «Бр».
У цих режимах високочастотний сигнал від наземних станцій, прийнятий прийомною антеною, поставляє у бл. 1Р, де підсилюється й детектуєтся. Продетектований сигнал надходить у бл. 10, де після відповідного перетворення видається в ПНК і сполученим виробам.
г) Робота в режимі САЗО.
Запитальний сигнал номера або висоти, прийнятий прийомними антенами, надходить у ПРМ САЗО (бл. 37м). У приймачі високочастотний сигнал підсилюється, детектується, нормалізується по амплітуді й із двох граничних пристроїв подає на два входи дешифратора САЗО (бл. 10), де відбувається декодування цих сигналів. На сигнал з низького граничного пристрою дешифратор видає в ПРМ САЗО строб АРУ для роботи системи АРУ.
На сигнал з високого граничного пристрою дешифратор виробляє сигнали «Виклик №» й «Виклик н», які подаються на відповідач «С-69». Відповідач «СО-69» на ці сигнали видає певне сполучення кодових слів. У результаті шифратор САЗО (у бл. 10) координатний код адреси літака й через виріб 6202 (ПРД АОС) видає інформацію наземним станціям як відповідь на запитальний сигнал.
24.Призначення, склад, основні ттх та принцип дії за структурною схемою арк‑22.
25.Призначення, склад, основні ттх та принцип дії за структурною схемою арк‑15м.
26.Призначення, склад, основні ттх та задачі, що вирішуються за допомогою а‑324.
Бортове устаткування А-324 є частиною навігаційно-пілотажного комплексу, яке призначене для рішення завдань літаководіння й посадки при автоматичному, напівавтоматичному й ручному керуванні польотом літака.
Апаратура А-324 уявляє собою систему, що поєднує радіотехнічні й обчислювальні пристрої, які визначають поточні координати місця літака, здійснюють побудову траєкторії польоту й формування керуючих сигналів.
Апаратура А-324 забезпечує рішення наступних завдань:
- визначення координат місця розташування літака щодо наземного радіомаяка;
- обчислення координат місця розташування літака за даними автономної швидкості й курсу;
- корекцію автономно обчисленних координат за даними радіотехнічної апаратури ближньої (РСБН) і дальньої (РСДН) навігації;
- формування й видачу сигналів траєкторного керування літаком у горизонтальній площині в режимі запрограмованого маршрутного польоту;
- формування й видачу сигналів керування в горизонтальній і вертикальній площинах у режимі повернення на один із чотирьох запрограмованих аеродромів посадки із пробиванням хмарності, виконання передпосадочного маневру з виходом на заданий курс посадки, автоматичним включенням режиму посадки й виконанням повторного заходу правим або лівим колом;
- формування й видачу сигналів керування в горизонтальній площині в режимі повернення на незапрограмований аеродром;
- формування й видачу сигналів керування курса і глісади зниження в режимі посадки;
- впізнавання наземного радіомаяка РСБН на борту літака.
Тактико-технічні дані:
1. Дальність дії радіотехнічних пристроїв апаратури при роботі з радіомаяками РСБН становить:
50 км на висоті польоту 250 м;
110 км на висоті польоту 1000 м;
250 км на висоті польоту 5000 м;
355 км на висоті польоту 10000 м;
450 км на висоті польоту 20000 м.
2. Передавальний пристрій апаратури має потужність випромінювання не менш 0,5 квт на будь-якому частотно-кодовому каналі (ЧКК).
3. Похибка визначення полярних координат за сигналами наземного радіомаяка РСБН:
по каналу азимута 2 δА = ± 0,25°;
по каналу дальності 2 δД = ± (0,2 + 3 • 10-4 Д) км, де Д - дальність, км.
4. Похибка видачі полярних координат (похибка індикації) на індикаторні прилади НПП і ППД-2:
по каналу азимута 2 δА = ± 2°;
по каналу дальності 2δД= ± (0,2 + 3 • 10-4 Д) км.
5. Діапазон робочих частот апаратури по лінії зв'язку РСБН:
по каналу зв'язку "літак-земля" від 726 до 812,8 Мгц
по каналу зв'язку "земля-літак" від 873 до 1000,5 Мгц.
6. Число частотно-кодових каналів у режимі "Навігація" - I76, у режимі "Посадка" - 40.
7. Діапазон програмування
φ0 = ± 90°; λ0= ± 180°; ∆φ = ± 22,5°; ∆λ = ± 22,5°. Програма зберігається без перезапису не більше 7 діб.
8. Робоча область у режимі автономного обчислення ортодромічних координат ± 3276,8 км.
9. Максимальна похибка визначення ортодромічних координат по сигналах СПС і ДВШЗ
2δ = ± (0,03 S+4 t/ч +3) км, де s - пройдений шлях, км; t - час польоту, ч.
10.Похибка корекції ортодромічних координат:
по радіоданим РСБН 2δ= ± (0.015Д.+ 3) км;
по радіоданим РСДН 2δ= ± 600 м при геометричному факторі Кr=2,8.
11. Інструментальна похибка формування заданого курсу
2δ=±(2+ 40/ R1)° для R1<40 км і
2δ=±3° для R1>40км
де R1 - дальність до цілі, км.
12. Похибка розрахунку дальності до цілі по ортодромічним координатам автономного обчислювача 2δ =±(5±0,02 R1) км.
13. Похибка розрахунку виходу в створ ЗПС для чотирьох запрограмованих аеродромів посадки на відстані 21,0 км по бічному відхиленню 2δ = ±500 м.
14. Похибка формування сигналу відхилення від заданої висоти:
на крейсерській висоті 11000 м - не більше ± 500 м;
на висоті передпосадочного маневру 630 м - не більше ± 30м;
на висоті повторного заходу ± 50 м.
15. Траєкторія пробивання хмарності вниз під кутом нахилу ---(6 ± I )°.
16. Електроживлення й споживані потужності:
по мережі 27 В постійного струму - не більше 230 Вт;
по мережі 36 В 400 Гц трифазного змінного струму -не більше 130 * А;
по мережі 115 В 400 Гц змінного струму - не більше 220 В А.
17. Приймач апаратури А-324 має чутливість
у режимі "Навігація":
по азимутальному тракту - -130 дб / Вт,
по далекомірному тракту - -115 дб /Вт;
у режимі "Посадка":
по тракту курсових сигналів - -110 дб,
по тракту глісадних сигналів - -110 дб.
18. Маса апаратури - не більше 50 кг,
19. Умови експлуатації:
температура навколишнього середовища + 60° С;
відносна вологість 98% при температурі + 40°C;
вібрація 10 .... 300 Гц.
До складу апаратури А-324 входять наступні пристрої:.
1. Літаковий запросчик далекоміра (СЗД) A-312-002.
2. Азимутально-далекомірний приймач (АДПР) A-3I2-001,
3. Спеціалізований перетворювач гіперболічних координат (СПГК) A-324-0I6.
4. Рама амортизаційна A-324-02I з блоками СЗД, АДПР і СПГК.
5. Процесор сигналів (ПС) A-324-00I на рамі амортизаційної А-324-006.
6. Щиток керування (ЩУ) A-324-03I.
7. Прилад дальності ППД-2.
8. Пристрій захисту (УЗ) А-312-026.
27. полета на ППМ, выбранный аэродром без использования радиоданных (автономного счисления).
Режим автономного счисления осуществляется при отсутствии радиоданных от РСБН и РСДН.
В этом режиме
происходит вычисление параметров
курсового способа вывода самолета в
заданную точку, (пеленг и дальность до
этой точки) маршрута (ППМ, цель, аэродром).
Для этой цели в процессоре сигналов
осуществляется счисление текущих
ортодромических координат местоположения
самолета (ТКМС) ![]() и формирование сигналов траекторного
управления в "горизонтальной плоскости.
и формирование сигналов траекторного
управления в "горизонтальной плоскости.
Счисление ТКМС по данным автономной скорости и курса
 Счисление ТКМС
осуществляется непрерывно интегрированием
составляющих скорости самолета
Счисление ТКМС
осуществляется непрерывно интегрированием
составляющих скорости самолета ![]() и
и
![]() в ортодромической системе координат
х, у (рис.3.2)
в ортодромической системе координат
х, у (рис.3.2)
где Х0, У0 – начальные координаты самолета (координаты аэродрома вылета); R3 - радиус Земли.
Вычисляемые
в процессе полета ортодромические
координаты ![]() - на индикацию не выдаются, а используются
для вычисления заданного курса на
цель
- на индикацию не выдаются, а используются
для вычисления заданного курса на
цель ![]() и дальности до цели R1.
и дальности до цели R1.
Составляющие
скорости непрерывно подаются на
преобразователь скоростей из АЗУ в виде
постоянных напряжений. В преобразователе
скорости с помощью аналого-цифровых
преобразователей типа "напряжение-частота"
постоянные напряжения, соответствующие
составляющим скорости, преобразуются
в последовательности импульсов. Эти
последовательности импульсов поступают
в регистры
![]()
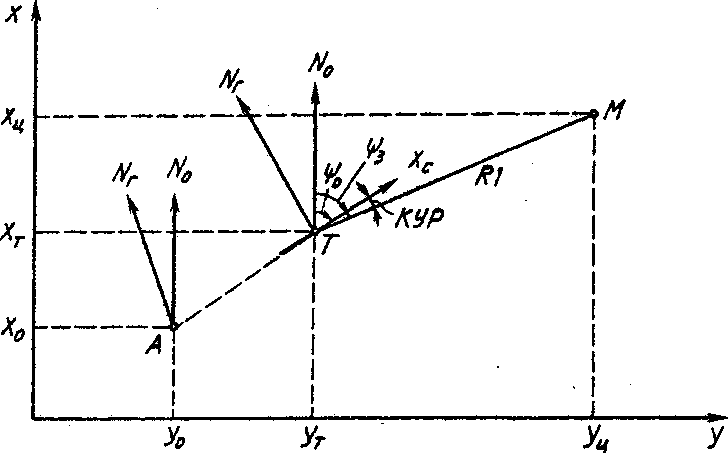
Точка А - аэродром вылета;
Точка Г – ТКМС;
Nг - географический сеер;
N0 - ортодромический север;
![]() - ортодромический курс самолета;
- ортодромический курс самолета;
-заданный курс на цель (пеленг)',
R1 - расстояние до цели;
КУР - курсовой угол цели.
Рис 3.2. Счисление ТКМС в автономном режиме
интеграторов, которые выполнены на реверсивных счетчиках. Счетчики производят счисление текущих ортодромических координат самолета в двоичном коде.
Датчиками скорости являются системы ДИСС, ИКВ, СВС. Выбор датчика скорости при счислении производится в преобразователе аналоговых сигналов с помощью селектора датчиков скорости по алгоритму выбора датчика. Составляющие скоростей от внешних систем поступают в виде переменных напряжений и в различных системах координат: от ДИСС и СВС - в системе координат, жестко связанной с самолетом, от ИКВ - в ортодромической системе координат. Ортодромическая система координат развернута относительно самолетной на угол, равный текущее курсу.
Для счисления текущих координат самолета составляющие скорости должны быть преобразованы в постоянные напряжения и приведены к ортодромической системе координат.
Составлявшие скорости в виде переменных напряжений от выбранной системы демодулируются в преобразователе скоростей и через коммутатор формирователя команд УЛ по цепям ввода вводятся в интеграторы 1-го и 2-го каналов преобразователя координат (в УН).
Здесь выполняется операция «П» (поворот вектора на угол, равный текущему курсу) и скорость раскладывается по осям ортодромической системы координат. Составляющие скорости и записываются в ячейки памяти АЗУ.
Для
выполнения операции «П» текущий курс
должен быть представлен двоичным
кодом. Текущий курс от внешних систем
(ИКВ или СКВ) поступает в виде переменных
напряжений на демодулятор ВТ-С и в виде
двух составляющих вектора через входной
коммутатор формирователя команд УР по
цепям ![]() и
и
![]() вводится в интеграторы 1-го и 2-го каналов
преобразователя координат УР.Далее
выполняется операция "В". В результате
выполнения операции "В" в выходном
регистре 1-го канала устройства
масштабирования получается код текущего
курса, который переписывается в ОЗУ.
Код текущего курса запрашивается из
ОЗУ при выполнении операции "П"
для приведения составляющих скорости
к ортодромической системе координат.
вводится в интеграторы 1-го и 2-го каналов
преобразователя координат УР.Далее
выполняется операция "В". В результате
выполнения операции "В" в выходном
регистре 1-го канала устройства
масштабирования получается код текущего
курса, который переписывается в ОЗУ.
Код текущего курса запрашивается из
ОЗУ при выполнении операции "П"
для приведения составляющих скорости
к ортодромической системе координат.
При
счислении координата ![]() учитывается широта ТКМС. На преобразователь
скоростей УИ (УСК) при преобразовании
постоянных напряжений, соответствующих
составляющим скорости
,
подаются два опорных напряжения. В канал
учитывается широта ТКМС. На преобразователь
скоростей УИ (УСК) при преобразовании
постоянных напряжений, соответствующих
составляющим скорости
,
подаются два опорных напряжения. В канал
![]() подается напряжение
подается напряжение ![]() ,
а в канал
с АЗУ подается напряжение
,
а в канал
с АЗУ подается напряжение ![]() .
Вычисление опорного напряжения с
широтной поправкой производится
следующим образом. Из ОЗУ запрашивается
хт
и записывается в регистр 1-го канала УР
со сдвигом на 3 разряда в сторону младших
разрядов, что при выбранном масштабе с
достаточно высокой точностью соответствует
делению ХT
на R3 . При выполнении УР операции «Р»
на интегратор преобразователя координат
1-го канала подается опорное напряжение
и производится разложение вектора,
заданного модулем
и углом
.
Вычисление опорного напряжения с
широтной поправкой производится
следующим образом. Из ОЗУ запрашивается
хт
и записывается в регистр 1-го канала УР
со сдвигом на 3 разряда в сторону младших
разрядов, что при выбранном масштабе с
достаточно высокой точностью соответствует
делению ХT
на R3 . При выполнении УР операции «Р»
на интегратор преобразователя координат
1-го канала подается опорное напряжение
и производится разложение вектора,
заданного модулем
и углом ![]() ,на
составляющие, В результате решения
получается опорное напряжение
, которое записывается в ячейку памяти
АЗУ.
,на
составляющие, В результате решения
получается опорное напряжение
, которое записывается в ячейку памяти
АЗУ.
Формирование и выдача сигналов траекторного управления в горизонтальной плоскости
 Вычисление
заданного курса
и дальности до цели R1 производится по
формулам
Вычисление
заданного курса
и дальности до цели R1 производится по
формулам
Для
вычисления заданного курса на точку
цели в УА по командам УП производится
вычисление координатных разностей в
виде кода между такой цели и ТКМС: ![]()
![]() подразумевается точка ПИЛ или АЭР.
подразумевается точка ПИЛ или АЭР.
Координаты
цели хранятся в РПЗУ. По команде,
задаваемой УП в адресную магистраль,
координата ![]() переписывается из РПЗУ во входной
регистр 1 сумматора. Затем из счетчика
1-го интегратора во входной регистр 2
сумматора переписывается координата
хт. По командам адресной магистрали Хт
переписывается из регистра УП во
входной регистр 2 УА. Далее по команде
УП производится вычитание Хт
из
.
Результат вычитания переписывается
во входной регистр 2-го канала УМ.
переписывается из РПЗУ во входной
регистр 1 сумматора. Затем из счетчика
1-го интегратора во входной регистр 2
сумматора переписывается координата
хт. По командам адресной магистрали Хт
переписывается из регистра УП во
входной регистр 2 УА. Далее по команде
УП производится вычитание Хт
из
.
Результат вычитания переписывается
во входной регистр 2-го канала УМ.
Аналогично производится вычитание Уг из Уц и запись результата во входной регистр 1-го канала УМ.
Результат вычислений используется в УР для определения и R1. Значение получается в виде кода, а значение R1- в виде постоянного напряжения, пропорционального дальности до точной цели. Код записывается в соответствующую ячейку ОЗУ, а R1 — в ячейку АЗУ.
Из АЗУ сигнал R1 подается в ВТ-сельсин для формирования сигнала управления работой ППД-2 (см.рис.2.32). Сигнал управления представляет собой напряжение рассогласования между сигналом R1 и напряжением обратной связи с ППД-2.
Преобразование кода в постоянное напряжение, пропорциональное и осуществляется в УР, результаты хранятся в АЗУ. Из АЗУ сигналы подаются в ВТ-сельсин для модуляции, после чего через схему имитирующую сельсин-датчик, поступают в САУ (НПП).