

1.2. Доплеровские измерители с непрерывным излучением частотно-модулированных сигналов
Применение ДИСС с частотной модуляцией непрерывно излучаемых колебаний позволяет уменьшить влияние просочившегося сигнала передатчика на чувствительность приемника и снизить требования к величине развязки между датчиком и приемником.
Возможность выделения доплеровской частоты при частотной модуляции по линейному закону иллюстрируется рис. 4. На этом рисунке ωизл представляет собой частоту излучаемого сигнала. Она равна:
ωизл = ωо [1 + Kω τ3 / ωо]
где Kω =dω / dt — крутизна изменения частоты.
Отраженный сигнал запаздывает на время τ 3, необходимое для распространения радиоволн до отражающей поверхности и обратно. Частота его ωотр. Поскольку ЛА с ДИСС движется, то отраженный сигнал сдвинут по частоте относительно излучаемого (пунктирная линия на рис. 4) еще и на доплеровскую частоту ωд. Частота биений ωр излучаемого и отраженного сигналов равна:
ωр = Kω τ3 + ωд
Если известна величина Kω τ3, то, зная частоту ωр, можно определить значение ωд
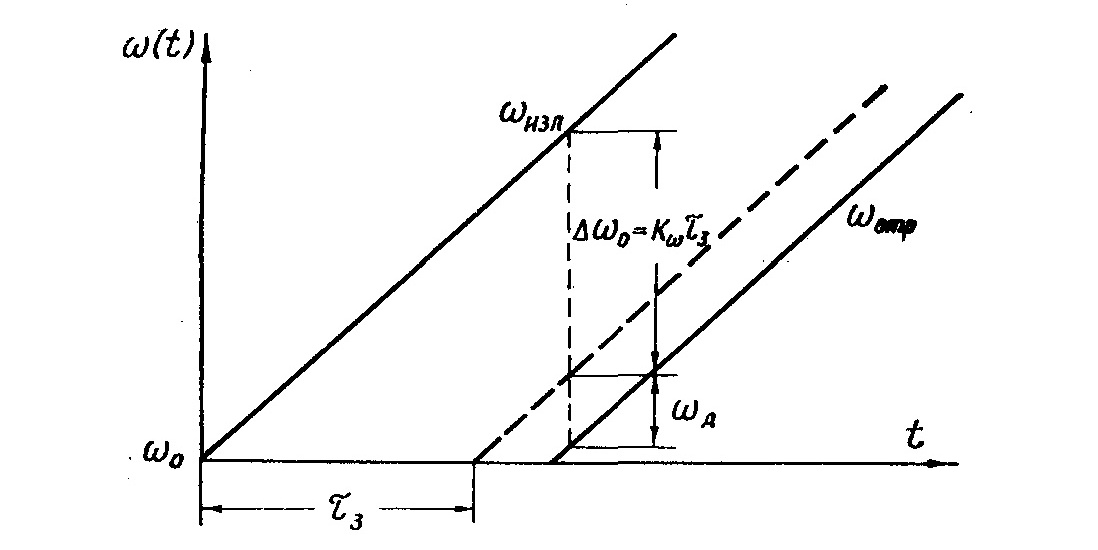
Рис. 4
Сигнал передатчика, просочившийся на вход приемника, практически совпадает по фазе и частоте с излучаемым сигналом, поскольку время его запаздывания пренебрежимо мало по сравнению с τ3. Шумовые составляющие за счет вибрации, изменения питающего напряжения генератора СВЧ и т. д. расположены в основном в области низких частот. Полезный же сигнал на частоте ωр соответствующим выбором Kω может быть отнесен достаточно далеко от этой области. На практике модуляция по частоте не может быть обеспечена достаточно линейной на большом участке и часто используется частотная модуляция по гармоническому закону. При этом в качестве частоты, которая используется для выделения доплеровского смещения в преобразованном сигнале, применяется одна из гармоник модулирующей частоты (чаще всего 3-я), чем и обеспечивается необходимая степень подавления просочившегося паразитного сигнала.
На рис. 5 приведена типовая структурная схема самолетного ДИСС с частотной модуляцией излучаемых колебаний, применяемая в ДИСС-013 [19]. Неподвижные передающая и приемная антенны формируют три луча с λ-образным расположением. Лучи антенн коммутируются с частотой 3 Гц. Частота сигнала клистронного генератора в передатчике модулируется по синусоидальному закону с частотой Fм. Отраженный сигнал, принимаемый в каждый момент времени по одному из лучей приемной антенны, поступает на балансный смеситель в приемник, гетеродинный сигнал на который подается непосредственно с СВЧ генератора передатчика.
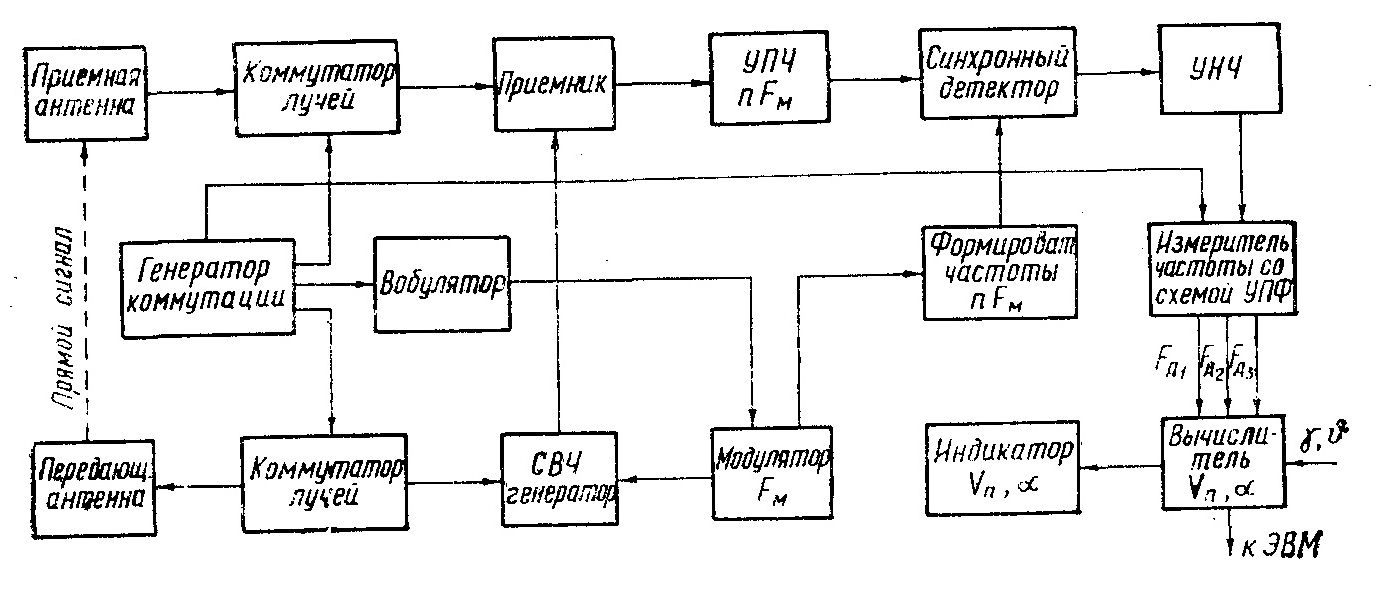
Рис. 5
Преобразованный отраженный сигнал поступает далее на полосовой усилитель УПЧ, средняя частота которого равна выбранной рабочей гармонике nFм частоты модуляции. Для ДИСС-013 n = 3. После усиления сигнал подается на синхронный детектор, в качестве опорного сигнала для него используется сигнал частоты nFм, формируемый из сигнала модулятора. Далее сигнал доплеровской частоты поступает на УНЧ, а затем на схему узкополосной фильтрации (УПФ) в измерителе частоты. Схема УПФ работает также в режиме коммутации синхронно с коммутацией лучей антенны и выдает непрерывно в вычислитель три средние доплеровские частоты Fд1, 2, 3, по которым вычисляется путевая скорость и угол сноса. Для исключения влияния «слепых» высот, присущих системам с периодическим законом изменения частоты модуляции, в измерителе применен вобулятор. Вобулятор изменяет (вобулирует) частоту модуляции Fм, равную 1 МГц, в пределах ±(150—200) кГц синхронно с коммутацией лучей антенны. Это приводит к изменению положения «слепых» высот.
Преимущества ДИСС с частотной модуляцией непрерывно излучаемых колебаний состоит в том, что в них:
1. Удается уменьшить влияние прямого просочившегося сигнала передатчика в приемник. Это позволяет снизить необходимый уровень развязки приемного и передающего трактов.
К недостаткам ДИСС с частотной модуляцией непрерывно излучаемых колебаний относится то, что:
1. С точки зрения энергетики данные ДИСС уступают ДИСС с непрерывным излучением немодулированных колебаний, так как в них используются не все составляющие спектра отраженного сигнала, а только те, которые попадают в полосовой фильтр УПЧ.
2. Применение периодического закона изменения частотной модуляции приводит к появлению «слепых» высот. Исключение их влияния требует введения вобуляции (изменения) частоты модуляции, что приводит к усложнению аппаратуры.