

19. Системи самонаведення (ссн) літаків, ракет.
1. Области применения систем самонаведения
Системы самонаведения в авиации применяются для ближнего наведения пилотируемых самолетов и управления ракетами. Характерным для систем самонаведения является высокая точность даже при действии по скоростным и маневрирующим целям. Однако дальность действия таких систем не всегда оказывается достаточной при решении практических задач, особенно для ракет класса «воздух — поверхность». Как самостоятельный вид системы самонаведения наиболее пригодны для управления пилотируемыми самолетами, а также ракетами классов «воздух—воздух» и «воздух—поверхность» малой и средней дальностей действия.
Часто бывает целесообразно применять самонаведение на конечном этапе полета ракеты при комбинированном управлении ею. В такой ситуации на участке, предшествующем самонаведению, управление ракетой осуществляется с помощью аппаратуры, обеспечивающей невысокую точность, но значительную дальность действия (например, по сигналам инерциального измерителя). Как уже говорилось в предыдущей главе, комбинированные системы управления с аппаратурой самонаведения управляемого объекта на последнем участке его полета создаются и для ракет классов «воздух—воздух» и «воздух—поверхность».
2.Структурные схемы систем самонаведения пилотируемых самолетов
Специфичной для системы самонаведения является ее информационная подсистема. Она содержит устройства, которые принимают и обрабатывают отражаемые или излучаемые целью сигналы. В состав таких устройств, предназначенных измерять параметры относительного движения цели и самолета, входят бортовая РЛС (БРЛС) , теплопеленгатор(ТП), авиационный стрелковый прицел(АСП), оптический прицел бомбометания и т.д. На самонаводящемся самолете может устанавливаться та или иная их совокупность. Каждое из устройств совокупности содержит БРЛС, ТП и АСП , может функционировать независимо друг от друга или все они вместе образуют комплексный измеритель.
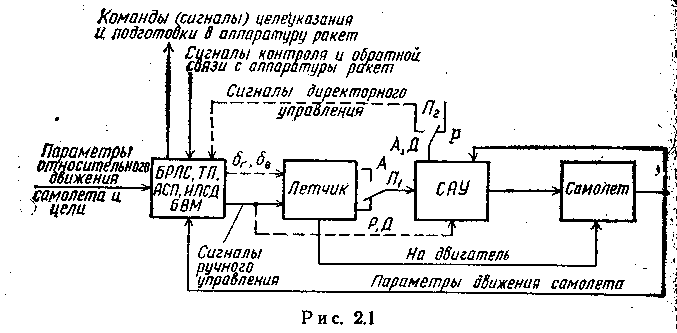
В простейших системах самонаведения сигналы троекторного управления для каналов бокового и продольного движений самолета получаются лишь с помощью измерителей параметров его движения относительно цели. Так, при необходимости совмещать в процессе самонаведения продольную ось самолета с линией визрования цели достаточно использовать выходные сигналы двух угломерных устройств БРЛС.
В более современных системах самонаведения сигналы траекторного управления при ручном управлении самолетом формируются бортовой вычислительной машиной (БВМ), на которую поступают сигналы с измерителей параметров движения цели относительно самолета, измерителей параметров собственного движения самолета (ИПСД) и с наземного или воздушного пункта наведения.
Информационная подсистема любой системы самонаведения самолета включает в свой состав также устройство индикации сигналов траекторного управления, углов пеленга цели, дальности до нее, положения самолета в пространстве и ряда других данных, необходимых для ориентирования летчика, применения им оружия и т.д.
Измерители параметров собственного движения самолета, именуемые нередко датчиками самолетной информации, используются, помимо того, для улучшения качества функционирования БРЛС. Так, например, с помощью гироскопических датчиков обеспечивается стабилизация ее антенны в пространстве.
В режимах директорного и автоматического управления выходные сигналы БВМ, отображающие параметры траекторного управления для режима ручного управления, подаются, как об этом уже говорилось, в САУ.
Чтобы облегчить условия работы, произвести настройку и проверить качество функционирования аппаратуры ракет, на нее с информационной подсистемы подаются команды (сигналы) целеуказания и подготовки. Контроль исполнения этих команд осуществляется благодаря цепям обратной связи между аппаратурой ракеты и информационной подсистемой самолета.
3. Структурная схема систем самонаведения ракет
Системы самонаведения ракет являются автоматическими. Структурная схема таких систем получается, из рис. 1.3,а и. имеет вид, представленный на рис. 2.2.

Параметры относительного движения ракеты и цели являются теми входными воздействиями, которые измеряются радиолокационными или оптико-электронными устройствами, именуемыми головками самонаведения (ГСН). При этом. в зависимости от диапазона используемых электромагнитных волн и принципов построения различают радиолокационные, телевизионные, тепловые и лазерные ГСН, обозначаемые сокращенно РГС^ТВГС, ТГС и ЛГС соответственно [24, 25]. С, помощью ~ГСП осуществляется также селекция цели на фоне мешающих отражений и излучений.
Выходные сигналы ГСН подаются в систему управления ракеты (СУР), содержащую измерители параметров собственного движения ракеты, используемых для формирования сигналов траекторного управления, обеспечения стабилизации ракеты и улучшения ее устойчивости и управляемости.
Связь ракеты с ГСН на рис. 2.2 говорит о возможности влияния угловых колебаний ракеты на качество работы ГСН и ввода в нее сигналов, характеризующих угловые и поступательные перемещения ракеты. Измеряя эти сигналы в ГСН, можно облегчить условия работы ее следящих измерителей. - Команды (сигналы) целеуказания и подготовки, а также сигналы контроля и обратной связи имеют тот же смысл, что и одноименные сигналы на рис. 2.1.