

“БОРТОВІ РАДІОНАВІГАЦІЙНІ СИСТЕМИ АВІАЦІЙНИХ КОМПЛЕКСІВ”
Принцип дії за структурною схемою основних типів вимірювачів допплерівської частоти. Обробка інформації двшз в пнк.
1. Основные типы многолучевых доплеровских измерителей
Доплеровские измерители по характеру излучения делятся на ДИСС с непрерывным излучением и с импульсным излучением. В свою очередь, доплеровские измерители с непрерывным излучением подразделяются на ДИСС, использующие непрерывные немодулированные колебания, и ДИСС, в которых применяются непрерывные частотно-модулированные колебания.
По способу выделения доплеровской частоты из отраженного сигнала ДИСС делятся на когерентные и некогерентные. При когерентном приеме сигналов частота (фаза) отраженного сигнала сравнивается с частотой (фазой) опорного сигнала передатчика.
При некогерентном приеме сигналов выделение доплеровской частоты основано на сравнении частот (фаз) колебаний двух одновременно приходящих отраженных сигналов, например, по переднему и заднему лучам.
Доплеровские измерители с импульсным режимом работы делятся на импульсные когерентные измерители (измерители с внутренней когерентностью) и импульсные некогерентные измерители (автокогерентные или измерители с внешней когерентностью).
1.1. Доплеровские измерители с непрерывным излучением немодулированных колебаний
В доплеровских измерителях с непрерывным излучением не модулированных колебаний используются для излучения и приема сигналов отдельные неподвижные относительно корпуса самолета антенны. Наличие отдельных антенн необходимо для того, чтобы на работу приемника не влиял проникающий сигнал передатчика, поскольку излучение и прием происходят одновременно. В ДИСС с непрерывным излучением используются когерентные способы выделения доплеровских частот. Непрерывный режим излучения применяется как в самолетных, так и в вертолетных ДИОС.
На рис. 1 приведена упрощенная структурная схема самолетного ДИСС с так называемой «нулевой» промежуточной частотой для одного луча.
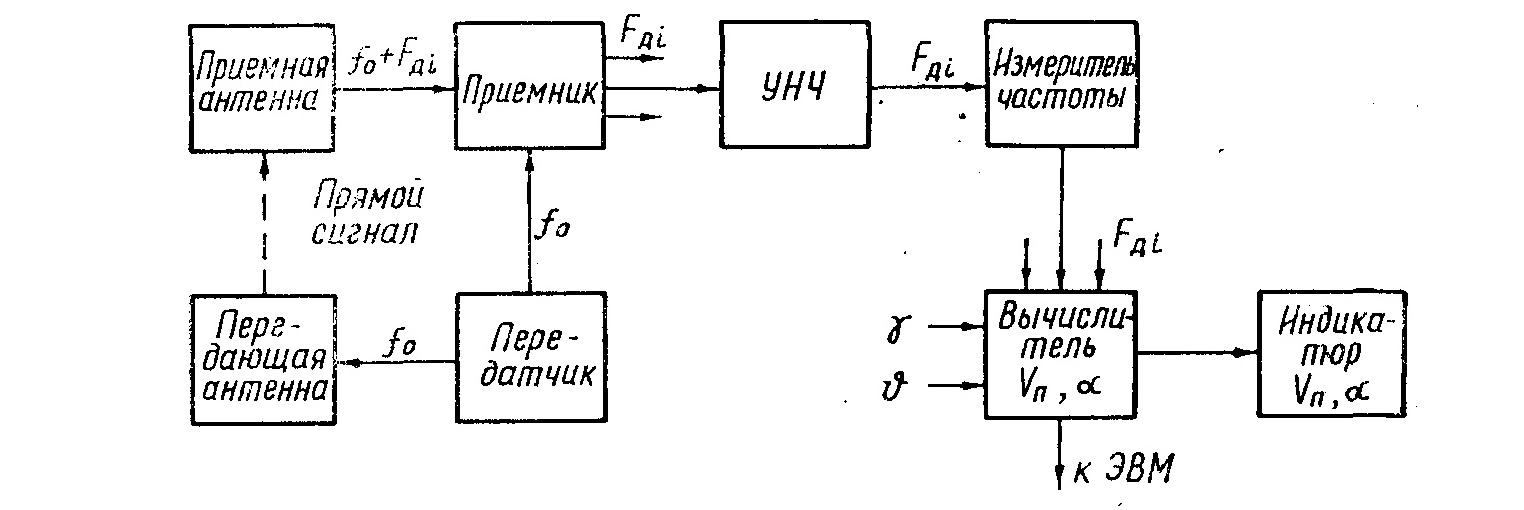
Рис. 1
От генератора непрерывных немодулированных колебаний, например клистрона, колебания с частотой f0 излучаются через передающую антенну по направлению к поверхности земли. Отраженные от земной поверхности сигналы со средними частотами f0±Fд принимаются приемной антенной. Сигналы, принятые по каждому из лучей приемной антенны, поступают на балансные смесители, входящие в состав приемника, куда также подается сигнал передатчика на частоте f0. Помимо полезного сигнала передатчика на входе приемника одновременно присутствует паразитный сигнал передатчика на частоте f0. Наличие паразитного сигнала определяется неполной развязкой между передающей и приемной антеннами.
Сигналы на выходе каждого из смесителей состоят из преобразованного полезного сигнала с доплеровской частотой Fд и из сигнала нулевых биений гетеродинного и просочившегося сигналов. При таком преобразовании теряется знак доплеровской частоты, что для самолетных ДИСС несущественно, поскольку этот знак определен положением луча в пространстве. Следует отметить, что паразитный сигнал может модулироваться по амплитуде за счет вибраций, шумов передатчика и т. д., что затрудняет процесс измерения средней доплеровской частоты, так как спектр частот паразитной амплитудной модуляции накладывается на полезный спектр доплеровских частот.
Сигналы доплеровских частот усиливаются и частично фильтруются в усилителе низкой частоты (УНЧ). Ширина полосы УНЧ выбирается исходя из диапазона возможных скоростей ЛА, а следовательно, и возможных доплеровских частот.
С выхода УНЧ доплеровский сигнал подается на измеритель средней доплеровской частоты. Результаты измерений в цифровой или аналоговой формах поступают в вычислительное устройство, которое по формулам (5.48)-(5.50) определяет путевую скорость и угол сноса. Результаты вычисления путевой скорости и угла сноса поступают в ЭВМ для вычисления текущих координат местоположения ЛА и на индикатор.
Помимо рассмотренной схемы ДИСС широкое применение находят схемы ДИСС с двойным преобразованием частоты в приемнике (рис. 2). В этой схеме преобразование отраженных сигналов в приемнике производится дважды: вначале на промежуточную частоту f0, а затем на доплеровскую частоту Fд. Это иллюстрируется спектрами сигналов, приведенными на рис. 3.
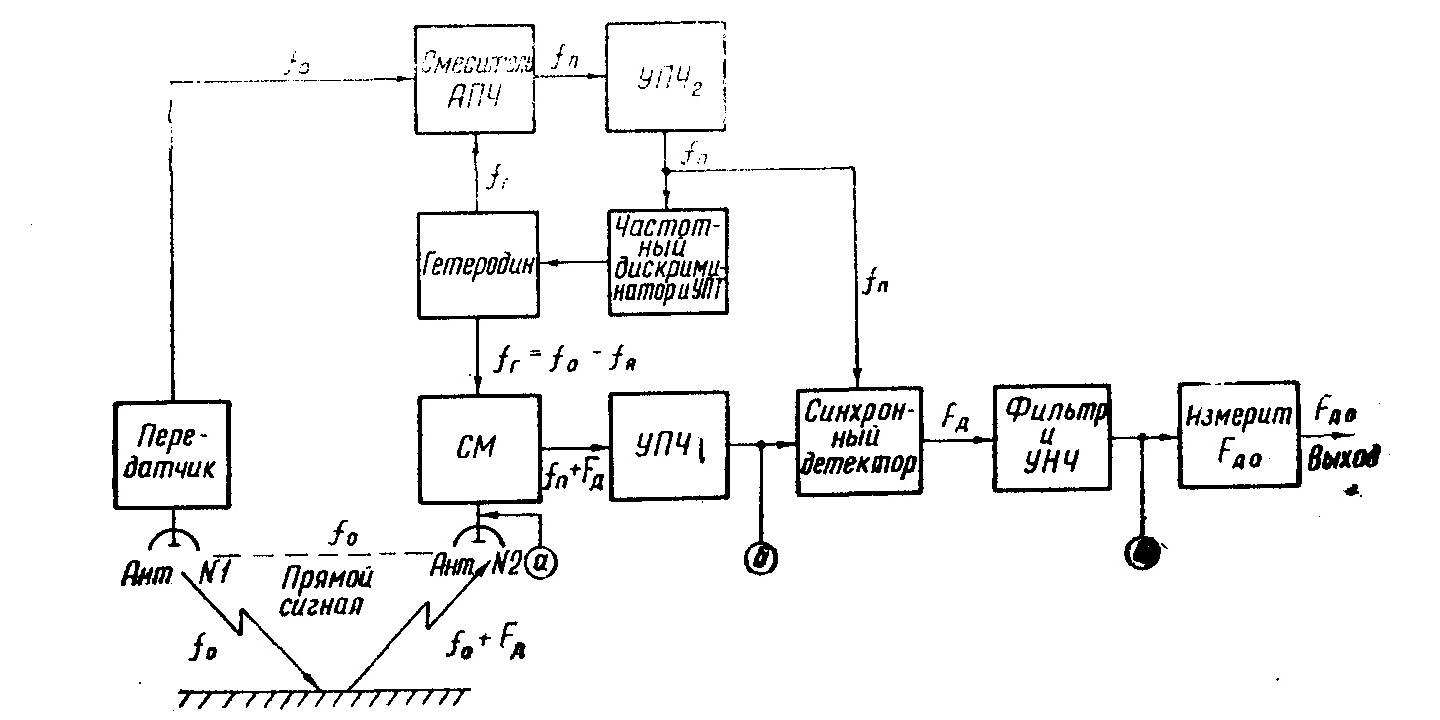 Рис.
2
Рис.
2
На вход смесителя приемника приходит отраженный сигнал с частотой f0±Fд (для переднего луча, см. рис. 3, а) и сигнал местного гетеродина на частоте fг = f0 – fп где fп — промежуточная частота. Для обеспечения постоянства значения промежуточной частоты часто применяется система автоматической подстройки частоты (АПЧ), которая включает смеситель АПЧ, УПЧ2 частотный дискриминатор с усилителем постоянного тока (УПТ) и местный гетеродин.
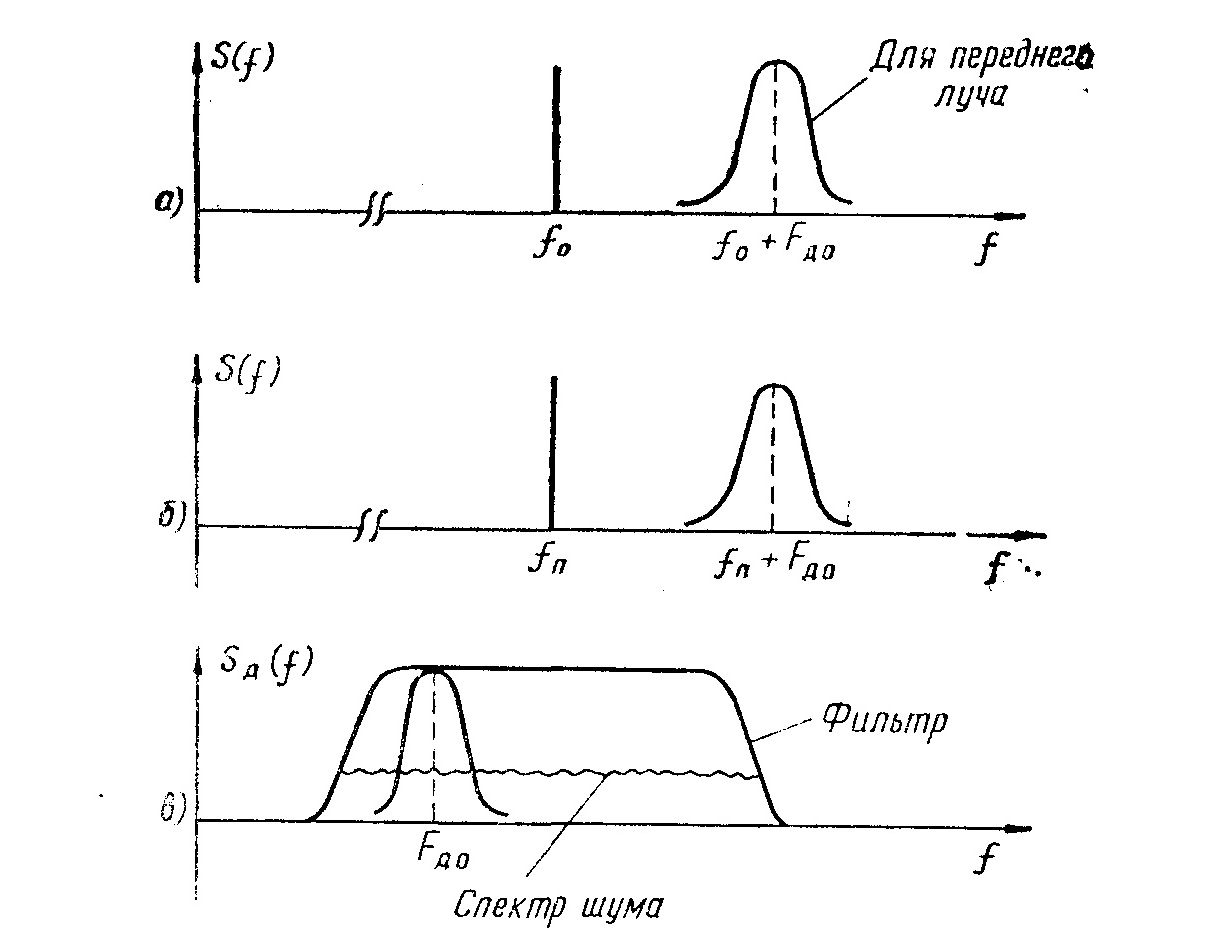
Рис. 3
С выхода смесителя сигнал на частоте fп + Fд (см. рис. 2 и 3, б) поступает через УПЧ1 на синхронный детектор, куда с УПЧ2 подается сигнал промежуточной частоты fп. Выходной сигнал синхронного детектора через полосовой фильтр и УНЧ поступает на измеритель средней доплеровской частоты Fд 0 (см.рис. 3, в). Отметим, что вместо синхронного детектора может использоваться и обычный детектор огибающей, но при этом уменьшается отношение сигнал / шум на выходе детектора.
Преимуществом схемы приемника с двойным преобразованием частоты по сравнению со схемой с нулевой промежуточной частотой является более высокая чувствительность. Это объясняется тем, что кристаллические смесители имеют большой уровень шумов в области низких доплеровских частот. В ДИСС с нулевой промежуточной частотой шумы непосредственно сказываются на результатах измерения Fд 0. В ДИСС с двойным преобразованием частоты эти шумы отфильтровываются с помощью УПЧ1.
Схемы с двойным преобразованием частоты применяются в доплеровских измерителях типов ТРАССА, ДИСС-Зс и др.
Отметим основные преимущества ДИСС с непрерывным излучением немодулированных колебаний:
1. Сравнительно легко реализуется когерентный прием, осуществление которого в импульсных ДИСС встречает технические трудности. Известно, что когерентный режим работы обеспечивает значительное повышение чувствительности по сравнению с некогерентным.
2. Коэффициент использования энергии отраженного сигнала равен 100%, так как энергия отраженного сигнала сконцентрирована в относительно узком диапазоне частот.
3. Отсутствуют «слепые» высоты, в пределах которых невозможно измерение путевой скорости и угла сноса.
4. Мощность отраженного сигнала уменьшается обратно пропорционально квадрату высоты полета, что является наиболее выгодной высотной зависимостью, которую можно реализовать.
5. Упрощается передатчик, так как не требуется модулятор, что уменьшает массу и габариты устройства, и, кроме того, как правило, не требуются высоковольтные источники питания.
К недостаткам ДИСС с непрерывным излучением немодулированных колебаний относятся:
1. Наличие двух антенн.
2. Трудность изоляции приемника от просочившегося сигнала передатчика, модулированного низкочастотными шумами, что ограничивает сверху высотность ДИСС, так как энергия просачивающегося (паразитного) сигнала от высоты не зависит, а энергия полезного сигнала с увеличением высоты уменьшается. В современных ДИСС степень развязки приемника и передатчика составляет 75—80 дБ. Увеличение степени развязки обеспечивается за счет введения частотной модуляции излучаемого сигнала.
3. Высокие требования к стабильности частоты передатчика.
Для пояснения последнего недостатка рассмотрим влияние быстрых изменений частоты передатчика.
Пусть за время распространения радиоволн до поверхности земли и обратно τ3 = 2Н / с частота колебании передатчика, которая используется в качестве сигналов гетеродина, изменилась на величину δ f0, относительно ее начального значения f0. В этом случае на выходе смесителя (например, схемы с нулевой промежуточной частотой) будет сигнал с частотой
(f0 + Fд) - (f0 ± δ f0) = Fд ± δ f0,
т. е. частота выделенного сигнала отличается от истинной Fд, на величину ± δf0. Для случая, когда уход частоты передатчика за время распространения радиоволны τ3 происходит с постоянной скоростью (d f0 / dt = const), можно определить требования к стабильности частоты в следующем виде:
d f0 τ3 / dt ≤ (δ f0) доп,
где (δ f0) доп — допустимая величина ошибки измерения средней доплеровской частоты. Отсюда следует, что требования к стабильности частоты передатчика достаточно высокие и они тем выше, чем ниже Fдо, так как (δ f0) << Fдо.
Основное отличие вертолетных ДИСС, как отмечалось выше, вызвано необходимостью определения знака доплеровской частоты. Эта задача в приемниках вертолетных ДИСС решается применением квадратурных смесителей. Кроме того, в вертолетных ДИСС необходимо измерение всех трех составляющих вектора скорости, начиная от нулевых значений в режиме висения.