

3. Погрешности информационно–измерительных систем. Методы оценки
Экспериментатор, планируя измерения, должен иметь сведения о точности подсистем информационно–измерительной системы летных испытаний (бортовой, внешнетраекторной, радиотелеметрической) для оценки ожидаемой точности измерений и сопоставления ее с требуемой. Эти сведения должны быть представлены в одних и тех же критериях. Кроме того, если бортовые датчики, согласующие устройства и регистрирующие устройства в соответствии с целью и задачами летного эксперимента выбираются или заказываются экспериментатором из большого набора приборов, выпускаемых серийно, то измерительная трасса, оснащенная средствами внешнетраекторных и радиотехнических измерений, достаточно универсальна для проведения различных летных испытаний и может быть использована в конкретном эксперименте в соответствии с ее возможностями. Таким образом, для оценки результатов летного эксперимента необходимо, прежде всего, на основе известных погрешностей отдельных средств и подсистем информационно–измерительной системы оценить ее точность в целом.
Методы оценки погрешностей одномерных измерительных устройств хорошо разработаны и в основном закреплены законодательно. Эти же методы распространяются (с определенными допущениями) на информационно–измерительные системы последовательной структуры. К ним можно отнести, например, оценку точности системы измерения какой-либо физической величины, состоящей из датчика, согласующего устройства и регистратора, или оценку точности информационно–измерительной системы, если известна погрешность измерительной системы и системы обработки.
Информационно–измерительные системы летных испытаний – системы многомерные, структура простейших из них параллельная или параллельно–последовательная. Разработка методов оценки погрешностей таких систем еще не завершена. Некоторые рекомендации для оценки их точности, изложенные в классических работах, а также используемые практически при летных испытаниях, приведены ниже.
При летных испытаниях различные физические величины имеют разные пределы измерения и требования к точности их измерения различны. В большинстве случаев целесообразна оценка погрешности информационно–измерительной системы для каждой измеряемой величины и введение критерия оценки ее погрешности в целом в виде совокупности оценок погрешности измеряемых ею физических величин
![]() .
.
Например, радиотехническая измерительная система оценивается совокупностью погрешностей измерения дальности, углов визирования, скорости изменения дальности и производных углов. Точно также, погрешности n-мерной бортовой и радиотелеметрической систем оцениваются n-мерным вектором, где каждый компонент вектора – погрешность измерения одного входного сигнала.
Оценка погрешности
информационно–измерительной
системы. Для предварительной оценки
составляющих вектора основной статической
погрешности N-мерной
информационно–измерительной системы,
состоящей из n различных
преобразователей, участвующих в измерении
одной физической величины, погрешности
которых
![]() известны (рис. 3), имеем в линейном
приближении
известны (рис. 3), имеем в линейном
приближении
![]() .
.
Здесь
![]() – абсолютная погрешность j-ro
преобразователя;
– абсолютная погрешность j-ro
преобразователя;
![]() – выходной сигнал, соответствующий i-й
измеряемой величине;
– выходной сигнал, соответствующий i-й
измеряемой величине;
![]() – выходной сигнал j-го
преобразователя;
– выходной сигнал j-го
преобразователя;
![]() – коэффициент влияния j-го
преобразователя на соответствующую
компоненту погрешности
информационно–измерительной
системы, зависящий
от типа связей.
– коэффициент влияния j-го
преобразователя на соответствующую
компоненту погрешности
информационно–измерительной
системы, зависящий
от типа связей.
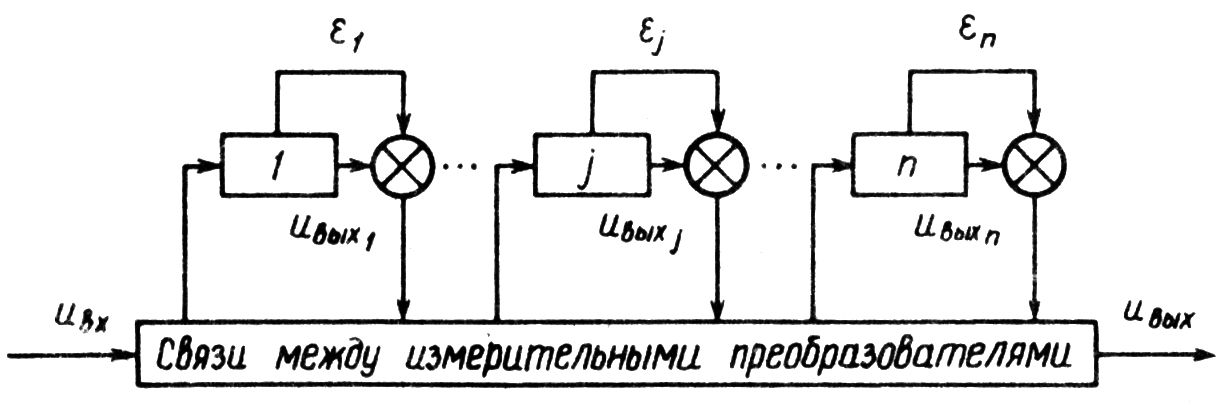
Рис. 3. К оценке погрешностей информационно–измерительной системы:
n – количество преобразований; 1, ..., j, ..., n – преобразователи; – абсолютная погрешность j-го преобразователя; – выходной сигнал j-го преобразователя; – выходной сигнал информационно–измерительной системы.
При оценке относительной погрешности информационно–измерительной системы это выражение принимает вид
![]() ,
,
где
 – безразмерный коэффициент влияния
j-ro
преобразователя.
– безразмерный коэффициент влияния
j-ro
преобразователя.
Индекс «0» у производной в приведенном выражении подчеркивает, что коэффициент влияния вычисляется для нормальных условий. Коэффициент влияния зависит от схемы включения преобразователя в информационно–измерительной системе и от оператора преобразователя.
Если зависимости
![]() пропорциональные и связь между
измерительными преобразователями
последовательная, то
пропорциональные и связь между
измерительными преобразователями
последовательная, то
![]() ,
т.е. относительная погрешность любого
преобразователя приводится к выходу
информационно–измерительной системы
без трансформации. Именно поэтому
суммарная относительная среднеквадратичная
погрешность бортовой информационно–измерительной
системы оценивается выражением
,
т.е. относительная погрешность любого
преобразователя приводится к выходу
информационно–измерительной системы
без трансформации. Именно поэтому
суммарная относительная среднеквадратичная
погрешность бортовой информационно–измерительной
системы оценивается выражением
![]() ,
,
где
![]() –~ соответствующие погрешности датчика,
согласующего устройства и регистратора.
–~ соответствующие погрешности датчика,
согласующего устройства и регистратора.
Подобный вид имеет
выражение для оценки суммарной
относительной среднеквадратичной
погрешности информационно–измерительной
системы, состоящей из измерительной
системы и системы обработки
![]() ,
где
,
где
![]() – среднеквадратичные погрешности
измерительной системы и системы
обработки.
– среднеквадратичные погрешности
измерительной системы и системы
обработки.
Каждая из составляющих погрешностей в суммарной погрешности информационно–измерительной системы оценивается теоретически и проверяется экспериментально в лабораторных условиях в соответствии с нормативными документами (ГОСТ, ОСТ, методики, инструкции). Окончательная оценка погрешности информационно–измерительной системы выполняется экспериментально в условиях, имитирующих летный эксперимент или при проведении специального летного эксперимента.