

1.Архитектура и принципы работы обычных эвм с центральным процессором (cpu)
По производительности и по внешнему виду современные компьютеры мало чем напоминают первые ЭВМ. В качестве примера можно привести компьютер, который мог занимать весь этаж института, а по выполняемым функциям едва дотягивал до того, что сейчас может сделать ноутбук, размером с школьный учебник. Однако, основные идеи, а также составные части, алгоритмы (хотя параллельную обработку следует признать колоссальным прорывом) практически не претерпели изменений со времен Алана Тьюринга и Джона фон Неймана. Поэтому в качестве основы всегда приводят неймановскую архитектуру ЭВМ.
1.1.Структура традиционной эвм
Архитектура ЭВМ фон Неймана предполагает наличие в ЭВМ следующих устройств:
Арифметико-логическое устройство - АЛУ;
Устройство управления – УУ;
Запоминающее устройство – ЗУ;
Устройство ввода-вывода – УВВ;
Пульт управления – ПУ.
С развитием технологии некоторые узлы объединяют, так например, центральный процессор представляет АЛУ и УУ. Поэтому схематично структуру можно представить следующим образом (рис. 1.1):
Теперь остановимся на основных узлах компьютера подробнее.
Процессор. Основное устройство ЭВМ. Процессор – вычислительное устройство. Счет происходит по специальным алгоритмам. В значительной степени быстродействие всей ЭВМ определяется производительностью (быстродействием) именно процессора. Для увеличения производительности в процессоре есть небольшая собственная память, называемая
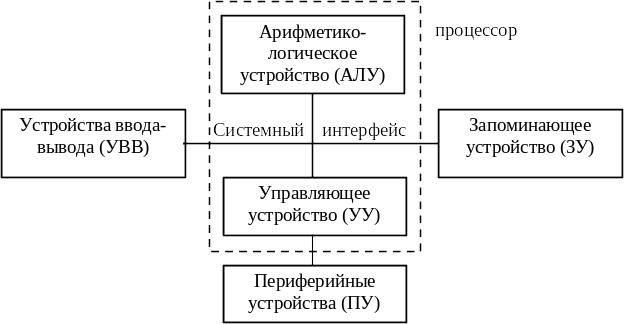
Рис. 1.1 Обобщённая логическая структура ЭВМ
сверхоперативной. Это позволяет отказаться от постоянного обращения к запоминающим устройствам. Все вычисления представляются в виде программы. Т.е. в виде инструкций для процессора в порядке их выполнения. При поступлении команды, процессор расшифрует ее, определит какие именно действия и над какими именно операндами необходимо выполнить (фактически, как таковых операций нет. К процессору поступает набор чисел – адресов ячеек памяти. В них может быть все что угодно – операция или операнд). Операции расшифровки и определения действия выполняет УУ. При помощи него же операнды из ЗУ помещаются в АЛУ. АЛУ, под управлением УУ, производит необходимые действия.
Память. Как было сказано выше, данные и программа находятся в ЗУ – памяти ЭВМ. Память – сложная структура, организованная по иерархическому принципу. В ней существуют (ЗУ) разных типов. Функционально их делят на внутреннюю память и внешнюю.
Под внутренней памятью понимают ЗУ, напрямую связанную с процессором. В ней хранится исполняемая часть кода программы и данные, которые непосредственно используются в вычислениях. Эту память отличает высокое быстродействие, однако она очень сильно ограничена по объему. Внутреннюю память делят на оперативную (ОЗУ) и постоянную (ПЗУ). Основную часть внутренней памяти составляет ОЗУ, именно в ней принимается, хранится и через нее выдается информация. Эта память энергозависима. Т.е. при выключении питания, данные, находящиеся в ней потеряются. ПЗУ заполняется на этапе изготовления ЭВМ (в ней находятся часто используемые (универсальные) программы, данные необходимые для загрузки и тестирования оборудования ЭВМ). Эта часть внутренней памяти энергонезависима.
Внешняя память – самая большая по объему вмещаемой информации. Выполнение запросов процессора выполняется без его непосредственного вмешательства. К внешней памяти относятся как жесткие диски, так и различные накопители (CD, DVD, карты памяти, внешние жесткие диски). Последние позволяют быстро и удобно переносить данные с одной ЭВМ на другую, однако обладают меньшим быстродействием. Чаще всего они служат для резервирования информации.
УВВ. Устройства ввода вывода ЭВМ, с которыми пользователь взаимодействует непосредственно. Именно к этой группе относятся клавиатура, мышь, монитор, принтер, сканер, различные манипуляторы и многие другие периферийные устройства. Это самое необходимое звено для общения человека и ЭВМ.
Для связи устройств ЭВМ существует системный интерфейс. В малых ЭВМ в качестве системного интерфейса используются системные шины. В высокопроизводительных ЭВМ могут использоваться специальные устройства, имеющие встроенные процессоры. Это обеспечивает высокую скорость передачи данных. По системным шинам может передаваться различная информация (различают шины адреса и шины данных, шины управляющих сигналов).
При описании ЭВМ важно выделить ее основные характеристики, такие как:
Быстродействие. С одной стороны, это количество элементарных операций, выполняемых центральным процессором в секунду (любая простейшая операция – сложение, пересылка, сравнение и т.д.). С другой – узким местом зачастую становится память ЭВМ. Т.к. независимо от количества возможных операций, при нехватке данных, основное ограничение будет накладывать время поиска необходимых операндов в памяти.
Производительность. В отличие от быстродействия, которое обусловлено системой элементов, производительность связана с архитектурой ЭВМ. Величина быстродействия не является постоянной, выделяют пиковое быстродействие (определяется тактовой частотой процессора без учета обращений к оперативной памяти), номинальное (учитывается время обращения к оперативной памяти), системное (учитываются системные издержки на организацию вычислительного процесса), эксплутационное (определяется характером решаемых задач).
Объем памяти. Величина, показывающая максимальный объем данных, которые можно хранить в ЭВМ.
Точность вычислений. Определяется разрядностью процессора (количеством разрядов, используемых для представления одного числа). В настоящее время используются 32 и 64 –разрядные процессоры. Для повышения точности используют удвоенную или утроенную разрядную сетку. При этом число разбивают на несколько частей, и каждую из них записывают в виде отдельного числа.
Система команд. Это набор команд, которое способен выполнить процессор ЭВМ. Также она показывает в каком виде должны быть записаны операнды, какой формат должны иметь команды. В современных процессорах число элементарных команд составляет от десятка до сотен команд. Это такие операции как сложение, сравнение, передача числа из регистра в регистр, преобразование в различные системы счисления. Сейчас выделяют две основные системы формирования команд. Это архитектура CISC (Complete Instruction Set Computer) – компьютер с полным набором команд, и RISC (Reduced Instruction Set Computer) – компьютер с сокращенным набором команд. Вторая архитектура проще в аппаратной реализации, однако при программировании необходимо «объяснять» процессору большее число операций.
Стоимость. Эта характеристика определяется набором элементов каждой конкретной ЭВМ. Сюда же относят стоимость внешних элементов, а также стоимость программного обеспечения.
Надежность. Эта характеристика во всех областях определяется одинаково, как способность сохранять свои свойства при заданных условиях эксплуатации в течение определенного времени. Для количественной оценки можно применять вероятность безотказной работы при данных условиях за определенное время, наработку на отказ и др. Зачастую отказ одного из элементов ЭВМ может привести к неработоспособности всей вычислительной системы.
Прочие характеристики. Сюда можно отнести габариты, масштабируемость, энергопотребление и др.