|
МАТИ |
|
|
|
|
|
|
|
|
|
|
|
Пухов Андрей Александрович |
|
кафедра “Автоматизированного проектирования ЛА” |
|
02.05.2005 |
|
64 |
|||||||||||||||||||
|
|
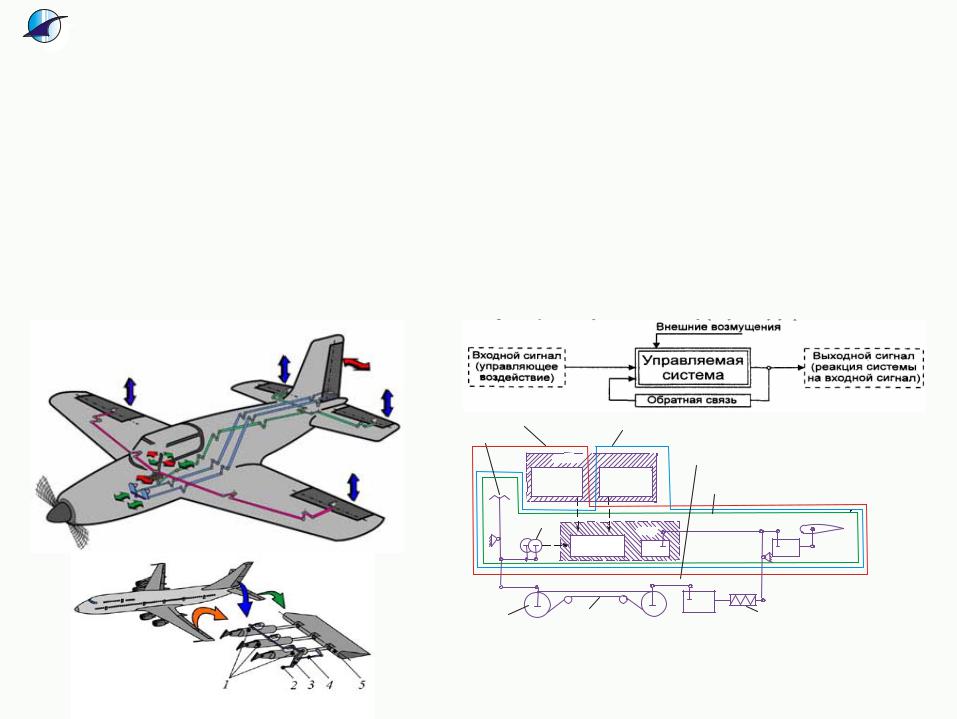
Расчет основных параметров оперения |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
МАТИ |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
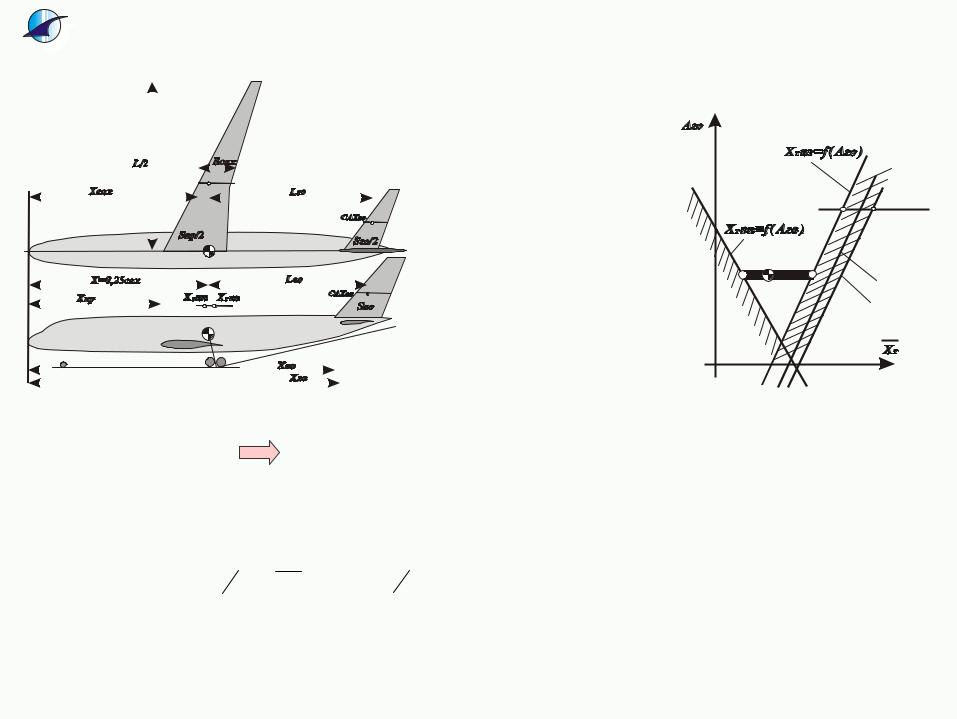
Строим первую граничную линию. Вторая граничную линия определяется условием устойчивости по перегрузке σn на расчетном крейсерском режиме |
|
|||||||||||||||||||||||||||||||||||||
М = 0,8 , Н = 11км , G = 96378кг. |
|
|
|
|
ϖZ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СуαГО |
(1 − ε α )+ mϖZ Z |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σ |
|
= X |
|
− |
X |
|
|
− К |
|
|
|
А |
|
||||||||
|
Для |
|
|
|
|
|
σn =mZCу + mZ |
≤σnmin |
|
n |
|
|
T |
|
|
TБГО |
|
|
ГО |
|
ГО |
Суα |
|
|
min |
μ mϖZ Z |
||||||||||||
|
неманевренных |
|
|
|
μ |
|
|
|
|
μ = |
C ГПV |
2 |
у |
|
АГО |
|
= |
(X T − X TБГО |
)− σ n |
− |
μ |
|||||||||||||||||
|
самолетов: |
|
|
σ nmin = −0,15 |
|
mϖZ Z = −4,4 |
ba g |
|
; |
|
|
|
К ГО |
СуСуαГОα (1 − ε α ) |
|
|||||||||||||||||||||||
|
|
|
|
|
G |
|
|
|
96378 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,25 − 0,29 − |
|
− 4,4 |
|
|
|
|
|
|
|||||||
σnmin = 0 |
CуГП = 0,7M 2 pH S |
= |
0,7 ×0,82 ×2314 ×170 |
= 0,547 |
Задаемся |
: X T |
= 0,25 ; |
|
|
|
|
АГО ′ |
= |
|
|
|
0,95 |
|
604 ,31 |
= −0,0344 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C ГПV 2 |
у |
0,547 ×236 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,35 − 0,29 − |
|
|
− 4,4 |
|
|
|
|
|
|
||||||||
|
|
μ = |
X TБГО = 0,29 |
Задаемся |
: X T |
= 0,35 ; |
|
|
|
|
АГО |
′ |
= |
|
|
|
|
|
604 ,31 |
= 0,0708 |
|
|
|
|||||||||||||||
|
|
ba g |
= |
5,14 |
×9,8 |
= 604,31; |
|
|
|
|
|
|
|
|
0,95 |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Наносим вторую граничную линию на график и сдвигаем ее влево наσnmin |
= −0,15 . Между граничными линиями откладываем диапазон центровок: |
xT = |
||||||||||||||||||||||||||||||||||||
0,1. Получаем значение потребного АГО xТпп = 0,2; |
xТпп = 0,3 |
практически величину АГО увеличивают на 10-12% в целях обеспечения устойчивости и |
||||||||||||||||||||||||||||||||||||
управляемости на всех режимах полета АГОпракт. =0,77. Потребная относительная площадь горизонтального оперения для :xТср = 0,25 |
|
|
|
|||||||||||||||||||||||||||||||||||
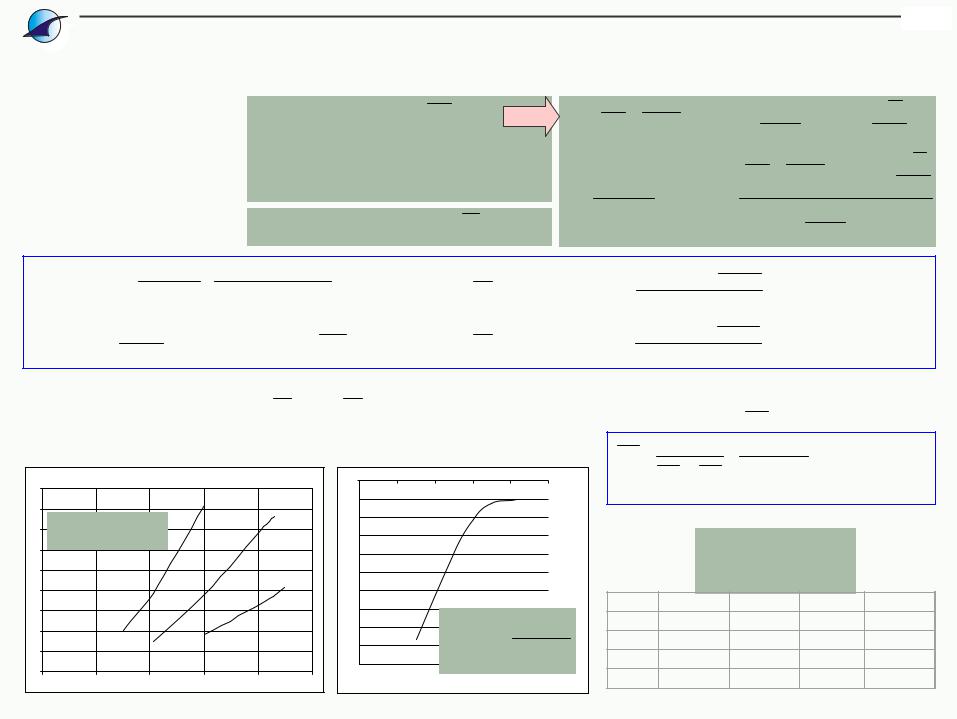
Определение зависимости отклонений (расходов) органа продольного |
|
|
|
|
SГО |
= |
|
АГО |
|
|
|
= |
|
1,2 |
|
= 0,27 |
|
|
||||||||||||||||||||
управления на единицу нормальной перегрузки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
LГО |
′ |
− xТср |
|
4,73 −0,25 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
4,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
-0,01 0 |
0,2 |
0,4 |
0,6 |
|
0,8 |
|
1 |
|
|
|
|
|
|
LГО = 22м; |
SГО = 0,27 170 = 45,5м² |
|
||||||||||||
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
nу |
(M ) |
|
|
|
|
|
-0,02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
f =ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3,5 |
|
|
|
|
|
-0,03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тCуCу |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
3 |
|
|
|
|
|
|
-0,04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
nу |
|
= − |
Г.П |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
|
|
||||
2,5 |
|
|
|
|
|
|
|
|
|
|
-0,05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тZ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
-0,06 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,5 |
|
|
|
|
|
|
|
|
|
|
-0,07 |
|
|
|
|
Су |
|
|
|
|
|
|
|
|
0,3 |
|
|
|
|
0,6 |
|
|
0,83 |
0,9 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
расп. |
|
|
|
|
|
|
|
Сугп |
|
3,51 |
|
|
|
|
0,878 |
|
0,459 |
0,39 |
|
||||||||
1 |
|
|
|
|
|
|
|
|
|
|
-0,08 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
nу |
|
= |
|
доп. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
-0,09 |
|
|
|
|
|
|
|
mzCy |
|
-0,085 |
|
|
|
|
-0,085 |
|
-0,085 |
-0,1 |
|
||||||||
0,5 |
|
|
|
|
|
|
|
|
|
|
-0,1 |
|
|
|
|
СуГ.П. |
|
|
|
|
mzϕ |
|
-3,44 |
|
|
|
|
-3,58 |
|
-3,68 |
-3,72 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0,2 |
|
0,4 |
|
M |
0,6 |
|
0,8 |
1 |
|
|
M |
|
|
|
|
|
|
|
|
|
ϕn |
|
-0,08673 |
|
|
|
|
-0,02085 |
|
-0,0106 |
-0,01048 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
65 |
|
|
|
|
|
МАТИ |
|
|
|
|
|
|
|
|
|
Пухов Андрей Александрович |
кафедра “Автоматизированного проектирования ЛА” |
02.05.2005 |
|
||||||||||||||||||
|
|
|
Статистические данные по оперению |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
МАТИ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
Тип |
|
|
Горизонтальное оперение |
|
|
|
|
|
|
|
|
|
Вертикальное оперение |
|
|
|
|
|
|
|
|||||||||
|
|
самолета |
|
Аго |
Sго |
λго |
χго |
|
ηго |
|
Sрв |
|
|
|
Вво |
|
Sво |
|
λво |
|
χво |
|
|
ηво |
|
Sрн |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
Фоккер F-28 |
|
0,972 |
0,255 |
3,83 |
27,5 |
|
2,08 |
|
0,197 |
|
|
|
|
0,091 |
0,203 |
1,00 |
40 |
|
|
|
|
0,187 |
|
|
|
||||||
|
|
ВАС 111 |
|
0,908 |
0,256 |
3.38 |
25 |
|
1,67 |
|
0,274 |
|
|
|
|
0,048 |
0,132 |
0.91 |
41 |
|
|
|
|
0,254 |
|
|
|
||||||
|
|
DC-9-10 |
|
1,147 |
0,295 |
4,93 |
31,5 |
|
2,84 |
|
0,280 |
|
|
|
|
0,081 |
0,192 |
0,95 |
43,5 |
|
|
|
|
0,270 |
|
|
|
||||||
|
|
АЗООВ |
|
1,068 |
0,267 |
4,13 |
32,5 |
|
2,00 |
|
0,295 |
|
|
|
|
0,102 |
0,204 |
1,62 |
40 |
|
|
2,3 |
|
0,243 |
|
|
|
||||||
|
|
L-1O11 |
|
0,928 |
0,371 |
4,00 |
35 |
|
3,00 |
|
0,215 |
|
|
|
|
0,083 |
0,196 |
1,83 |
35 |
|
|
|
|
0,186 |
|
|
|
||||||
|
|
B747-200 |
|
1,000 |
0,267 |
3,60 |
37 |
|
3,80 |
|
0,185 |
|
|
|
|
0.099 |
0,196 |
1,38 |
44 |
|
|
3,15 |
|
0,229- |
|
|
|
||||||
|
|
|
|
A340 |
|
0,730 |
0,205 |
5,36 |
28 |
|
2,43 |
|
0,290 |
|
|
|
|
0,065 |
0,126 |
1,64 |
39 |
|
|
2,67 |
|
0,300 |
|
|
|
||||
|
|
|
АЗЗО |
|
0,870 |
0,195 |
5,20 |
28 |
|
2,75 |
|
0,320 |
|
|
|
|
0,055 |
0,122 |
1,55 |
39 |
|
|
2,67 |
|
0,360 |
|
|
|
|||||
|
|
|
|
A320 |
|
1,05 |
0,254 |
5,00 |
28 |
|
3,00 |
|
0,310 |
|
|
|
|
0,081 |
0,193 |
1,67 |
34 |
|
|
3,00 |
|
0,320 |
|
|
|
||||
|
|
|
|
A310 |
|
1,22 |
0,292 |
4,15 |
32 |
|
3,00 |
|
0,280 |
|
|
|
|
0,078 |
0,176 |
1,60 |
35 |
|
|
2,86 |
|
0,320 |
|
|
|
||||
|
|
В767-200 |
|
1,00 |
0,274 |
4,63 |
32 |
|
4,40 |
|
0,245 |
|
|
|
|
0,079 |
0,161 |
2,00 |
37 |
|
|
3,50 |
|
0,320 |
|
|
|
||||||
|
|
DC-10-30 |
|
0,74 |
0,264 |
4,87 |
34 |
|
2,90 |
|
0,285 |
|
|
|
|
0,081 |
0,221 |
1,92 |
40 |
|
|
|
|
0,145 |
|
|
|
||||||
|
|
|
Як-42 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,047 |
0,155 |
0,97 |
44,5 |
|
|
1,71 |
|
0,283 |
|
|
|
|||||
|
|
|
Ту-134 |
|
0,90 |
0,267 |
4,54 |
38 |
|
2,46 |
|
0,209 |
|
|
|
|
|
0,174 |
0,93 |
40 |
|
|
1,73 |
|
0,288 |
|
|
|
|||||
|
|
|
Ту-204 |
|
1,202 |
0,260 |
5,14 |
33 |
|
3,03 |
|
|
|
|
|
|
0,099 |
|
0,201 |
|
1,68 |
|
35 |
|
|
2,77 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|