

1.4. Основные задачи статики
Содержание статики абсолютно твердого тела составляют две основные задачи:
1. Задача о приведении сил: как данную систему сил заменить другой, в частности наиболее простой, ей эквивалентной.
2. Задача о равновесии: каким условиям должна удовлетворять система сил, приложенная к данному телу (или материальной точке), чтобы она была уравновешенной системой.
Первая основная задача имеет важное значение не только в статике, но и в динамике.
Вторая задача часто ставится в тех случаях, когда равновесие заведомо имеет место. Например, когда заранее известно, что тело находится в равновесии, которое обеспечивается связями, наложенными на тело. При этом условия равновесия устанавливают зависимость между всеми силами, приложенными к телу; во многих случаях с помощью этих условий удается определить опорные реакции. Хотя этим не ограничивается сфера интересов статики, нужно иметь в виду, что определение реакций связей (внешних и внутренних) необходимо для последующего расчета прочности конструкции.
В более общем случае, когда рассматривается система тел, имеющих возможность перемещаться друг относительно друга, одной из основных задач статики является задача определения возможных положений равновесия. Эти задачи рассматриваются в аналитической статике.
Глава II. Система сходящихся сил
2.1. Приведение системы сходящихся сил к равнодействующей
Силы называются сходящимися, если линии действия всех сил, составляющих систему, пересекаются в одной точке. Простейший пример трех сил был рассмотрен в главе I. Здесь рассматривается общий случай произвольного числа сил, образующих систему.
Существует немало практических задач, которые требуют исследования систем сходящихся сил; в частности, они возникают при расчетах шарнирно-стержневых систем (ферм). Кроме того, изучение системы сходящихся сил необходимо для дальнейших обобщений, относящихся к произвольной системе сил.
Прежде всего докажем теорему:
Система сходящихся сил эквивалентна одной силе (равнодействующей), которая равна сумме всех этих сил и проходит через точку пересечения их линий действия.
Пусть задана система сходящихся сил F1, F2, F3,…,Fn, приложенных к абсолютно твердому телу. Согласно следствию из аксиомы 1 перенесем точки приложения сил по линии их действия в точку пересечения этих линий. Таким образом, мы получаем систему сил, приложенных к одной точке. Она эквивалентна исходной системе сходящихся сил. Складывая теперь силы F1 и F2, на основании аксиомы 3 получим их равнодействующую:
R2 = F1 + F2.
Индекс в обозначении равнодействующей соответствует номеру добавляемой силы F2. Затем, сложив силу R2 с силой F3, найдем
R3 = R2 + F3 = F1 + F2 + F3.
Сила R3 является равнодействующей трех сил F1, F2, F3 и равна их сумме. Дойдя, таким образом, до последней силы Fп, получим равнодействующую R всей системы данных сил
R = Rn = F1 + F2 + Fn =ΣFi.
Этим соотношением и доказывается справедливость приведенной теоремы.

Построение равнодействующей может быть упрощено, если вместо параллелограммов построить силовой многоугольник. Пусть, например, система состоит из четырех сил. Если из конца вектора F1 отложить вектор F2, то вектор, соединяющий начало О и конец вектора F2, будет вектором R2.
Далее отложим вектор F3, помещая его начало в конец вектора F2. Тогда мы получим вектор R3, идущий от точки О к концу вектора F3. Наконец, точно так же прибавим вектор F4; при этом получим, что вектор, идущий от начала первого вектора F1 к концу вектора F4, является равнодействующей R.
Пространственный многоугольник, который получен указанным образом, называется силовым многоугольником.
На рис. 2.2 показан разомкнутый силовой многоугольник (конец последней силы не совпадает с началом первой силы); равнодействующая R направлена по замыкающей силового многоугольника. Конечно, при практическом построении силового многоугольника промежуточные равнодействующие R2, R3 и т.д. строить не нужно.
Е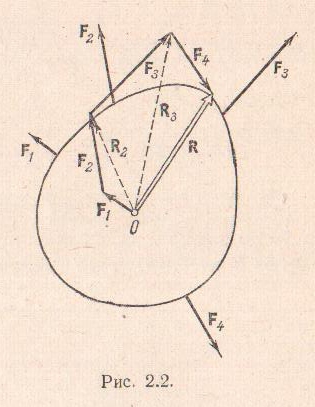 сли
для нахождения равнодействующей при
помощи силового многоугольника
используются правила геометрии или
тригонометрии, то такой способ нахождения
равнодействующей называется геометрическим
способом.
сли
для нахождения равнодействующей при
помощи силового многоугольника
используются правила геометрии или
тригонометрии, то такой способ нахождения
равнодействующей называется геометрическим
способом.
В случае плоской системы сил можно воспользоваться плоским чертежом, откладывая силы в некотором масштабе; равнодействующая определяется непосредственным измерением по чертежу. Такой способ ее нахождения называется графическим.
Наиболее общим способом определения модуля и направления равнодействующей является аналитический способ, который также вытекает из основного соотношения. Поместим, например, начало прямоугольной системы координат в точку пересечения линий действия сил; тогда, пользуясь теоремой, согласно которой проекция векторов на векторную ось равна сумме проекций на ту же ось слагаемых векторов, получим
Rx=Fkx=F1x+ F2x+…+Fnx,
Ry=Fky =F1y +F2y+…+Fny,
Rz=Fkz=F1z+ F2z+…+Fnz, (2.2) где Fkx, Fky, Fkz – проекции силы Fk на указанные оси, а Rx, Rу и Rz – проекции равнодействующей на те же оси.
Итак, проекции равнодействующей системы сходящихся сил на координатные оси равны алгебраическим суммам проекций этих сил на соответствующие оси.
С помощью выражений (2.2) можно найти модуль равнодействующей и ее направлений в прямоугольной системе координат Oxyz.
Так как составляющие равнодействующей R системы сил
Rx= Rxi, Ry= Ryj, Rz= Rzk (2.3) взаимно перпендикулярны, то модуль равнодействующей равен
 .
(2.4)
.
(2.4)
Направляющие косинусы равнодействующей соответственно равны
cos(x, R)=Rx/R, cos(y, R)=Ry/R, cos(z, R)=Rz/R. (2.5)
В частном случае, когда все силы расположены в одной плоскости, удобно выбрать систему координат Oxy в плоскости расположения сил. Тогда проекции всех сил на ось z равны нулю и вместо формул (2.2), (2.4) и (2.5) будем иметь
Rx=Fkx=F1x+ F2x+…+Fnx,
Ry=Fky =F1y +F2y+…+Fny, (2.6)
 ,
(2.7)
,
(2.7)
cos(x, R)=Rx/R, cos(y, R)=Ry/R. (2.8)