

3.2. Момент силы относительно точки и относительно оси.
Момент пары сил
Моментом силы относительно какой-либо точки (центра) называется вектор, численно равный произведению модуля силы на плечо, т.е. на кратчайшее расстояние от указанной точки до линии действия силы, и направленный перпендикулярно плоскости, проходящей через выбранную точку и линию действия силы в ту сторону, откуда "вращение", совершаемое силой вокруг точки, представляется происходящим против хода часовой стрелки. Момент силы характеризует ее вращательное действие.
Е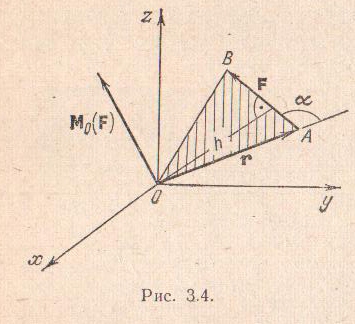 сли
О
– точка, относительно которой находится
момент силы F,
то момент силы обозначается символом
Мо(F).
Покажем, что если точка приложения силы
F
определяется
радиус-вектором r,
то справедливо соотношение
сли
О
– точка, относительно которой находится
момент силы F,
то момент силы обозначается символом
Мо(F).
Покажем, что если точка приложения силы
F
определяется
радиус-вектором r,
то справедливо соотношение
Мо(F)=r×F. (3.6)
Согласно этому соотношению момент силы равен векторному произведению вектора r на вектор F.
В самом деле, модуль векторного произведения равен
Мо(F)=rFsin=Fh, (3.7)
где h – плечо силы. Заметим также, что вектор Мо(F) направлен перпендикулярно плоскости, проходящей через векторы r и F, в ту сторону, откуда кратчайший поворот вектора r к направлению вектора F представляется происходящим против хода часовой стрелки. Таким образом, формула (3.6) полностью определяет модуль и направление момента силы F.
Иногда формулу (3.7) полезно записывать в виде
Мо(F)=2S, (3.8)
где S – площадь треугольника ОАВ.
Пусть x, y, z – координаты точки приложения силы, а Fx, Fy, Fz – проекции силы на координатные оси. Тогда, если точка О находится в начале координат, момент силы выражается следующим образом:
 .
(3.9)
.
(3.9)
Отсюда следует, что проекции момента силы на координатные оси определяются формулами:
MOx(F)= yFz-zFy,
MOy(F)= zFx-xFz,
MOy(F)= xFy-yFx. (3.10)
Введем теперь понятие проекции силы на плоскость.
Пусть даны сила F и некоторая плоскость. Опустим из начала и конца вектора силы перпендикуляры на эту плоскость.
Проекцией силы на плоскость называется вектор, начало и конец которого совпадают с проекцией начала и проекцией конца силы на эту плоскость.
Если в качестве рассматриваемой плоскости принять плоскость хОу, то проекцией силы F на эту плоскость будет вектор Fху.
Момент силы Fху относительно точки О (точки пересечения оси z с плоскостью хОу) может быть вычислен по формуле (3.9), если в ней принять z=0, Fz=0. Получим
MO(Fху)= (xFy-yFx)k.
Таким образом, момент направлен вдоль оси z, а его проекция на ось z в точности совпадает с проекцией на ту же ось момента силы F относительно точки О. Другими словами,
MOz(F)= MOz(Fху)= xFy-yFx. (3.11)
О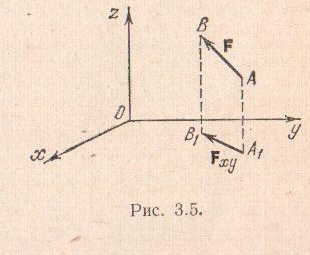 чевидно,
тот же результат можно получить, если
спроектировать силу
F
на любую
другую плоскость, параллельную хОу.
При этом точка пересечения оси z
с плоскостью будет уже иной (обозначим
новую точку пересечения через О1).
Однако все входящие в правую часть
равенства (3.11) величины х,
у,
Fх,
Fу
останутся
неизменными, и, следовательно, можно
записать
чевидно,
тот же результат можно получить, если
спроектировать силу
F
на любую
другую плоскость, параллельную хОу.
При этом точка пересечения оси z
с плоскостью будет уже иной (обозначим
новую точку пересечения через О1).
Однако все входящие в правую часть
равенства (3.11) величины х,
у,
Fх,
Fу
останутся
неизменными, и, следовательно, можно
записать
MOz(F)= MO1z(Fху).
Другими словами, проекция момента силы относительно точки на ось, проходящую через эту точку, не зависит от выбора точки на оси. Поэтому в дальнейшем вместо символа MOz(F) будем применять символ Mz(F). Эта проекция момента называется моментом силы относительно оси z. Вычисление момента силы относительно оси часто бывает удобнее производить посредством проектирования силы F на плоскость, перпендикулярную оси, и вычисления величины M z(Fху).
В соответствии с формулой (3.7) и учитывая знак проекции, получим:
Mz(F)=Mz(Fху)= ±Fху·h*. (3.12)
З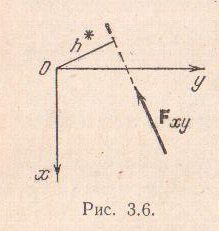 десь
h*
– плечо силы Fху
относительно точки О.
Если наблюдатель видит со стороны
положительного направления оси z,
что сила Fху
стремится повернуть тело вокруг оси z
против хода часовой стрелки, то берется
знак "+", и в противном случае –
знак "–".
десь
h*
– плечо силы Fху
относительно точки О.
Если наблюдатель видит со стороны
положительного направления оси z,
что сила Fху
стремится повернуть тело вокруг оси z
против хода часовой стрелки, то берется
знак "+", и в противном случае –
знак "–".
Формула (3.12) дает возможность сформулировать следующее правило для вычисления момента силы относительно оси. Для этого нужно:
выбрать на оси произвольную точку и построить плоскость, перпендикулярную оси;
спроектировать на эту плоскость силу;
определить плечо проекции силы h*.
Момент силы относительно оси равен произведению модуля проекции силы на ее плечо, взятому с соответствующим знаком (см. изложенное выше правило).
И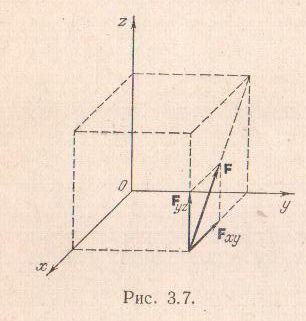 з
формулы (3.12) следует, что момент
силы относительно оси равен нулю в двух
случаях:
з
формулы (3.12) следует, что момент
силы относительно оси равен нулю в двух
случаях:
когда проекция силы на плоскость, перпендикулярную оси, равна нулю, т.е. когда сила и ось параллельны;
когда плечо проекции h* равно нулю, т.е. когда линия действия пересекает ось.
Оба эти случая можно объединить в один: момент силы относительно оси равен нулю тогда и только тогда, когда линия действия силы и ось находятся в одной плоскости.
Задача 3.1. Вычислить относительно точки О момент силы F, приложенной к точке А и направленной по диагонали грани куба со стороной а.
При решении подобных задач целесообразно сначала вычислить моменты силы F относительно координатных осей x, y, z. Координаты точки А приложения силы F будут
![]() ,
,
![]() ,
,
![]() .
.
Проекции силы F на координатные оси:
![]() ,
,
![]() ,
,
![]() .
.
Подставляя эти значения в равенства (3.10), найдем
![]() ,
,
![]() ,
,
![]() .
.
Эти же выражения для моментов силы F
относительно координатных осей можно
получить, пользуясь формулой (3.12). Для
этого спроектируем силу F
на плоскости, перпендикулярные оси х
и у. Очевидно, что
![]() .
Применяя изложенное выше правило,
получим, как и следовало ожидать, те же
выражения:
.
Применяя изложенное выше правило,
получим, как и следовало ожидать, те же
выражения:
![]() ,
,
![]() ,
,
![]() .
.
Модуль момента определится равенством
![]() .
.
Введем теперь понятие момента пары. Найдем сначала, чему равна сумма моментов сил, составляющих пару, относительно произвольной точки. Пусть О – произвольная точка пространства, а F и F' – силы, составляющие пару.
Тогда Мо(F)=ОА× F, Мо(F')=ОВ× F',
откуда
Мо(F)+ Мо(F')= ОА× F+ ОВ× F',
но так как F= -F', то
Мо(F)+ Мо(F')= ОА× F- ОВ× F=(ОА-ОВ)× F.
Принимая во внимание равенство ОА-ОВ=ВА, окончательно находим:
Мо(F)+ Мо(F')= ВА× F.
Следовательно,
сумма
моментов сил, составляющих пару, не
зависит от положения точки, относительно
которой берутся моменты.
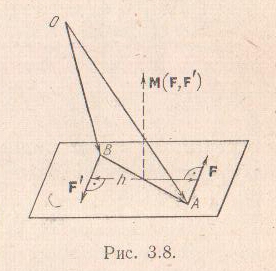
Векторное произведение ВА× F и называется моментом пары. Обозначается момент пары символом М(F, F'), причем
М(F, F')= ВА× F= АВ× F',
или, короче,
М= ВА× F= АВ× F'. (3.13)
Рассматривая правую часть этого равенства, замечаем, что момент пары представляет собой вектор, перпендикулярный плоскости пары, равный по модулю произведению модуля одной сил пары на плечо пары (т.е. на кратчайшее расстояние между линиями действия сил, составляющих пару) и направленный в ту сторону, откуда "вращение" пары видно происходящим против хода часовой стрелки. Если h – плечо пары, то М(F, F')=h×F.
Из самого определения видно, что момент пары сил представляет собой свободный вектор, линия действия которого не определена (дополнительное обоснование этого замечания следует из теорем 2 и 3 этой главы).
Для того, чтобы пара сил составляла уравновешенную систему (систему сил, эквивалентную нулю), необходимо и достаточно, чтобы момент пары равнялся нулю. Действительно, если момент пары равен нулю, М=h×F, то либо F=0, т.е. нет сил, либо плечо пары h равно нулю. Но в этом случае силы пары будут действовать по одной прямой; так как они равны по модулю и направлены в противоположные стороны, то на основании аксиомы 1 они составят уравновешенную систему. Обратно, если две силы F1 и F2, составляющие пару, уравновешены, то на основании той же аксиомы 1 они действуют по одной прямой. Но в этом случае плечо пары h равно нулю и, следовательно, М=h×F=0.