

Статика
Глава I. Основные понятия и аксиомы статики
1.1. Сила. Система сил. Равновесие абсолютно твердого тела
В теоретической механике изучается движение материальных тел относительно друг друга. Для этого требуется, прежде всего, построить модели объектов и дать определение понятий, с которыми имеет дело механика. В теоретической механике рассматривается простейшая модель "обычного" евклидова трехмерного пространства. Постулируется, что в этом пространстве существует хотя бы одна система координат, в которой справедливы законы Ньютона (инерциальная система). Многочисленные опыты и измерения показывают, что с высокой степенью точности система отсчета с началом в центре Солнечной системы и осями, направленными к "бесконечно удаленным неподвижным" звездам, является инерциальной системой. Если существует хотя бы одна инерциальная система, то их имеется бесчисленное множество. Инерциальная система – это система, в которой действуют законы Ньютона. Инерциальные системы отсчета условно называют неподвижными.
В статике, не внося никаких погрешностей в вычисления, можно считать, что системы координат, жестко связанные с Землей, неподвижны. Условия относительного равновесия в других, неинерциальных системах отсчета, в частности, в системах, движущихся относительно Земли, будут рассмотрены в динамике.
Как для статики, так и для динамики одним из основных является понятие силы. Первичное представление о ней дают наши мускульные ощущения.
В механике под силой понимается мера механического взаимодействия материальных тел, в результате которого взаимодействующие тела могут сообщать друг другу ускорения или деформироваться (изменять свою форму).
Из этого определения сразу вытекают два способа измерения сил:
первый, динамический способ, основан на измерении ускорения тела в инерциальной системе отсчета;
второй, статический способ, основан на измерении деформации упругих тел.
В механике не изучают физическую природу сил. Силы могут возникать при непосредственном контакте тел (например, сила тяги электровоза, передаваемая вагонам, сила трения между поверхностями соприкасающихся тел). Силы возникают и на расстоянии (например, силы притяжения небесных тел, силы взаимодействия электрически заряженных или намагниченных частиц и т.д.).
Сила является
векторной величиной – она характеризуется
численным значением или модулем, точкой
приложения и направлением.
Т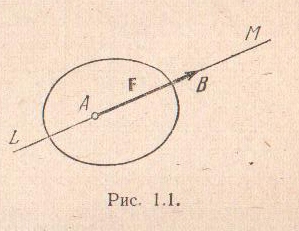 очка
приложения силы и ее направление
определяют линию действия силы. На рис.
1.1 показана сила F,
приложенная к точке А,
длина отрезка АВ
в соответствующем масштабе равна модулю
силы, точка В
называется концом силы; у конца силы; у
конца силы ставится стрелка, указывающая
направление действия силы. Прямая LM
называется линией
действия силы.
Условимся обозначать силу буквой жирного
шрифта, например, F,
а ее модуль той же буквой обычного
шрифта, т.е. F.
очка
приложения силы и ее направление
определяют линию действия силы. На рис.
1.1 показана сила F,
приложенная к точке А,
длина отрезка АВ
в соответствующем масштабе равна модулю
силы, точка В
называется концом силы; у конца силы; у
конца силы ставится стрелка, указывающая
направление действия силы. Прямая LM
называется линией
действия силы.
Условимся обозначать силу буквой жирного
шрифта, например, F,
а ее модуль той же буквой обычного
шрифта, т.е. F.
Для измерения модуля силы ее сравнивают с некоторой силой, выбранной в качестве единицы. В международной системе единиц измерения физических величин (СИ) за единицу силы принят один ньютон (1 Н), а в технической системе единиц (система МКГСС) – один килограмм силы (1 кГ или 1 кгс – не следует смешивать с единицей массы в системе СИ – 1 кг). Эти единицы связаны соотношениями
1 кГ ≈ 9,81 Н; 1 Н ≈ 0,102 кГ.
Р ассматривая
действие сил на материальные тела, мы
будем отвлекаться не только от физической
природы сил, но и от многих свойств самих
тел. Так, реальные твердые тела обычно
мало изменяют свою форму под действием
приложенных к ним сил. Поэтому для
решения многих задач механики допустимо
вовсе пренебречь малыми деформациями
(т.е. малыми изменениями формы) и
пользоваться моделью абсолютно
твердого тела. Под абсолютно твердым
телом понимают тело, в котором расстояния
между двумя любыми точками его остаются
неизменными независимо от действия тех
или иных сил.
Для краткости мы будем часто применять
выражение "твердое тело" или даже
просто "тело", имея в виду только
что введенное понятие абсолютно твердого
тела.
ассматривая
действие сил на материальные тела, мы
будем отвлекаться не только от физической
природы сил, но и от многих свойств самих
тел. Так, реальные твердые тела обычно
мало изменяют свою форму под действием
приложенных к ним сил. Поэтому для
решения многих задач механики допустимо
вовсе пренебречь малыми деформациями
(т.е. малыми изменениями формы) и
пользоваться моделью абсолютно
твердого тела. Под абсолютно твердым
телом понимают тело, в котором расстояния
между двумя любыми точками его остаются
неизменными независимо от действия тех
или иных сил.
Для краткости мы будем часто применять
выражение "твердое тело" или даже
просто "тело", имея в виду только
что введенное понятие абсолютно твердого
тела.
С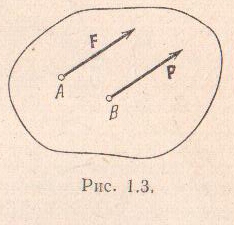 овокупность
нескольких сил (F1,…,
Fn)
называется системой сил. Если,
не нарушая состояния тела, одну систему
сил (F1,…,
Fn)
можно
заменить другой системой (P1,…,
Pk)
и наоборот,
то такие системы называются эквивалентными.
Символически
это обозначается следующим образом:
овокупность
нескольких сил (F1,…,
Fn)
называется системой сил. Если,
не нарушая состояния тела, одну систему
сил (F1,…,
Fn)
можно
заменить другой системой (P1,…,
Pk)
и наоборот,
то такие системы называются эквивалентными.
Символически
это обозначается следующим образом:
(F1,…, Fn) = (P1,…, Pk).
Введенное понятие эквивалентности систем сил не устанавливает условий, при выполнении которых две системы будут эквивалентны. Оно означает только, что эквивалентные системы сил вызывают одинаковое состояние тела (одинаковые ускорения или, если тело не абсолютно твердое, одинаковые деформации).
В том случае, когда система сил (F1,…, Fn) эквивалентна одной силе R, т.е.
(F1,…,
Fn)
= R,![]()
последняя называется равнодействующей данной системы сил. Это означает, что одна равнодействующая сила может заменить действие всех данных сил. Не всякая система сил имеет равнодействующую.
Как уже отмечалось, в инерциальной системе координат выполняется закон инерции. Это означает, в частности, что тело, находящееся в начальный момент в покое, остается пребывать в этом состоянии, если на него не действуют никакие другие силы.
Если абсолютно твердое тело остается в состоянии покоя при действии на него системы сил (F1,…, Fn), то последняя называется уравновешенной системой сил или системой сил, эквивалентной нулю:
(F1,…, Fn) = 0.
Часто в этом случае говорят, что тело находится в равновесии.