

4.3. Аналитическое определение главного вектора
и главного момента пространственной системы сил
Определим модули и направление векторов FО и МО. Пусть декартова система координат Охуz имеет начало в центре приведения О. Тогда проекции силы FО на координатные оси найдутся из соотношений:
FОх= ∑ Fkх= F1х+ F2х+ … + Fпх,
FОу= ∑ Fkу= F1у+ F2у+ … + Fпу,
FОz= ∑ Fkz= F1z + F2z+ … + Fпz. (4.4)
Модуль силы FО равен
 ,
(4.5)
,
(4.5)
а направление определяется направляющими косинусами
![]() ,
,
![]() ,
,
![]() .
(4.6)
.
(4.6)
Для проекций вектора МО имеем (см. (3.10))
![]() ,
,
![]() ,
,
![]() .
(4.7)
.
(4.7)
Следовательно, модуль и направление вектора МО определяются формулами
![]() ,
(4.8)
,
(4.8)
![]() ,
,
![]() ,
,
![]() .
(4.9)
.
(4.9)
При приведении пространственной системы сил к одной силе и одной паре сил угол между направлением главного вектора и направлением главного момента может получиться любым в зависимости от действующих сил. Для определения этого угла воспользуемся формулой, выражающей скалярное произведение векторов FО и МО:
FО∙МО= FО МО соs(FО, МО).
Отсюда
![]() ,
(4.10) или, в соответствии
с формулами (4.6) и (4.9),
,
(4.10) или, в соответствии
с формулами (4.6) и (4.9),
![]() (4.11)
(4.11)
В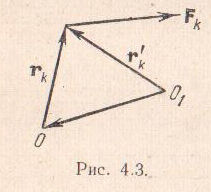 ыясним,
как будет меняться сила и пара сил, к
которым приводится рассматриваемая
система сил, при перемене центра
приведения. Так как сила FО
равна главному вектору, т.е. сумме всех
сил системы, то для любого центра
приведения она будет одной и той же.
Если в качестве нового центра приведения
взята точка О1,
то
ыясним,
как будет меняться сила и пара сил, к
которым приводится рассматриваемая
система сил, при перемене центра
приведения. Так как сила FО
равна главному вектору, т.е. сумме всех
сил системы, то для любого центра
приведения она будет одной и той же.
Если в качестве нового центра приведения
взята точка О1,
то
![]() (4.12)
(4.12)
Для центра приведения О1 момент пары равен главному моменту относительно этого центра приведения
![]() ,
(4.13)
,
(4.13)
где r'k – радиус-вектор точки приложения силы Fk, проведенный из нового центра приведения О1. Из рассмотрения рисунка видно, что
![]() .
.
Подставив значение r'k в формулу (4.13), получим
![]() ,
,
откуда на основании формул (4.2) и (4.3)
![]() ,
(4.14)
,
(4.14)
т.е. момент пары, а следовательно, и главный момент при перемене центра приведения изменяются на момент силы, равной главному вектору, приложенному в старом центре приведения, относительно нового центра приведения.
Из формулы (4.14) следует, что если в каком-либо центре приведения, например, в точке О, FО =0 и МО =0, то и для любого центра приведения О1 будет
FО1=0, МО1=0.
П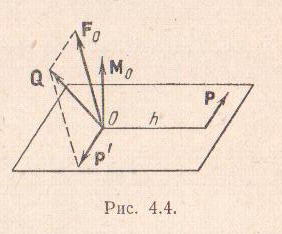 риведение
произвольной системы сил к силе и паре
сил не является единственным способом
приведения к простейшему виду (хотя и
применяется наиболее часто). Возможен
и другой вариант приведения, согласно
этому варианту система
сил, как угодно расположенных в
пространстве, может быть приведена к
двум силам, в общем случае не лежащим в
одной плоскости.
риведение
произвольной системы сил к силе и паре
сил не является единственным способом
приведения к простейшему виду (хотя и
применяется наиболее часто). Возможен
и другой вариант приведения, согласно
этому варианту система
сил, как угодно расположенных в
пространстве, может быть приведена к
двум силам, в общем случае не лежащим в
одной плоскости.
В самом деле, пусть произвольная система сил приведена в данном центре О к силе FО и паре сил с моментом МО. Выберем силы, составляющие пару равными Р и Р' (Р= – Р'); приложим одну из них (например, Р') в центре приведения и сложим ее с силой FО. В результате получим силу Q = FО+ Р', уже не лежащую в плоскости действия пары (Р, Р').
Таким образом, пространственная система сил приведена к двум силам Q и Р, которые в общем случае не лежат в одной плоскости.