

5.8. Угол между двумя плоскостями
Две пересекающиеся плоскости образуют четыре двугранных угла. Полуплоскости P1 и Q1 (рис. 56) образуют двугранный угол.
Из геометрии известно, что за меру двугранного угла принимают величину его линейного угла ( АВС, см. рис. 56).
Пример. Заданы следы плоскостей Р и Q. Требуется определить проекции угла между плоскостями (рис. 57).
Решение: Определяется линия пересечения плоскостей Р и Q (линия MN, см. рис. 57). Строится вспомогательная плоскость S, перпендикулярная линии MN: точка SX выбирается произвольно, след SV проводится перпендикулярно линии m’n’, след SH – перпендикулярно линии mn.
Определяется линия пересечения плоскостей Р и S (линия AD, см. рис. 57).
Находится точка пересечения линий KD и MN – точка В.
Определяется точка “С”, расположенная на линии пересечения плоскостей Q и S.
Точки b и c, b’ и c’ соединяются прямыми.
В результате построения получают две проекции угла АВС - abc и a’b’c’.
6. Способы преобразований ортогональных проекций
Понятия и определения.
К способам преобразований ортогональных проекций относятся способы вращения, совмещения и перемены плоскостей проекций.
Сущность способов заключается в том, что они дают возможность переходить от общих положений геометрических объектов относительно плоскостей проекции к частным положениям.
Достигается это:
Изменением положения геометрического объекта путем вращения его вокруг некоторой оси так, чтобы объект оказался в частном положении относительно неизменной системы плоскостей проекций – способ вращения, или частный случай - способ совмещения.
Заменой системы плоскостей проекций новой системой так, чтобы геометрический объект, не изменяя своего положения в пространстве, оказался в каком – либо частном положении относительно новой системе плоскостей проекций – способ перемены плоскостей проекций. [2,7]

6..1. Способ вращения
Пусть, например, необходимо определить натуральную величину отрезка АВ способом вращения (рис.58,а)
Через точку а’ проводится ось ПМ перпендикулярно плоскости Н. При вращении прямой АВ вокруг оси вращения точка А будет неподвижной, а точка В будет описывать окружность. Поскольку плоскость вращения точки В перпендикулярна оси АМ, то на горизонтальной проекции траекторией движения будет окружность с центром в точке а и радиусом R = ab. На фронтальной проекции траекторией движения точки В будет являться линия, проведенная через точку ' параллельно оси Х (см.рис.58,а).
На горизонтальной проекции прямая ab поворачивается вокруг точки a до положения, когда она будет параллельна оси Х (прямая ab1- см.рис.58).
Точка b1 проецируется на линию, проведенную через точку b’ параллельно оси Х – точка b’1 . Новое положение прямой АВ – a’ b1 определяет натуральную величину отрезка АВ.
На рис. 58,б показано определение натуральной величины отрезка СD вращением вокруг оси DN, перпендикулярной плоскости V.
Пример1. Заданы плоскости Р и Q следами. Требуется определить угол наклона плоскости Р к плоскости Н и плоскости Q к плоскости V (рис. 59).
Решение:
Определяется натуральная величина угла
![]() ,
составленного плоскостями Р и Н:
,
составленного плоскостями Р и Н:
Выбирается ось вращения m’n’, перпендикулярная плоскости Н и расположенная в плоскости V (см.рис.59,а).
Из точки n’ опускается перпендикуляр на след Рн. Точка К – основание перпендикуляра.
След Рн поворачивается вокруг точки n’ до положения, когда между осью Х и следом образуется угол 90° (точка К1).
Точка m’ расположена на следе Рv. Очевидно, при вращении плоскости Р вокруг оси m’n’ точка m’ будет неподвижной. Она и определит положение следа Рv1 совместно с точкой К1 (Рх).
В результате выполненных преобразований получили фронтально – проектирующую плоскость Р1. Угол образованный следом Рv1 и осью Х представляет натуральную величину угла наклона плоскости Р к плоскости Н (угол ° , см.рис.59,а).
Определяется угол, образованный плоскостями Q и V. Ось вращения плоскости располагается в плоскости Н перпендикулярно плоскости V (ось ab – см.рис.59,б).
След Qv поворачивается вокруг точки а до положения, когда между следом и осью Х образуется угол 90°. В результате получают новое положение следа - Qv1.
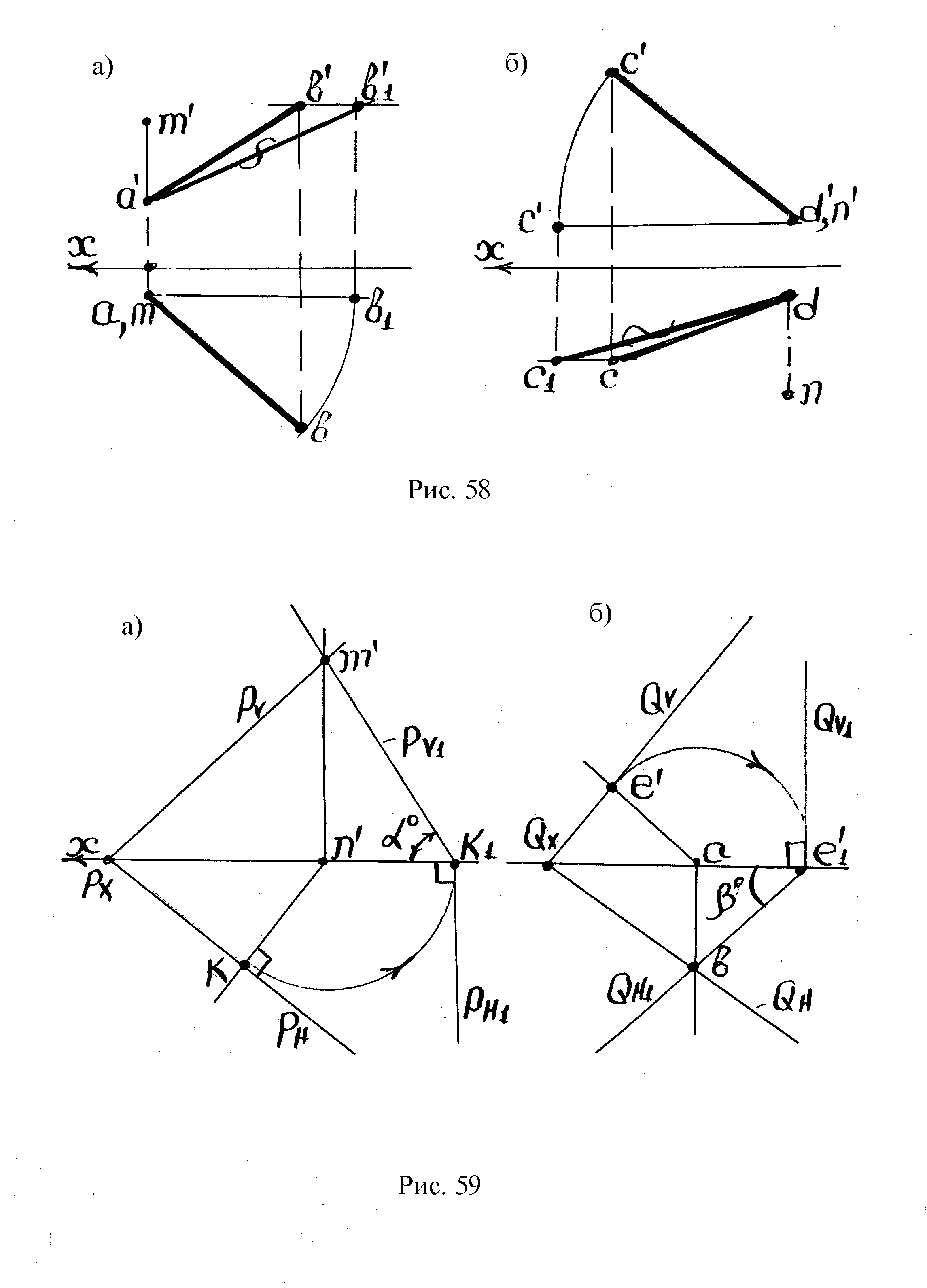
След QH1 определяется положением неподвижной точки “в” расположенной на следе Qн и точкой С1.
Из рис.59,б видно, что после преобразования плоскость Q стала горизонтально – проектирующей плоскостью. Угол, образованный следом QH1 и осью Х является натуральной величиной угла наклона плоскости Q к плоскости V.
Пример2. Заданы проекции треугольника АВС. Требуется определить натуральную величину фигуры вращением вокруг ее горизонтали (рис.60).
Решение: Проводится горизонталь a’ d’ и определяется ее горизонтальная проекция. Прямая АD принимается за ось вращения фигуры.
Определяется центр и радиус вращения точки В. На горизонтальной проекции из точки b опускается перпендикуляр на прямую ad. Точка К – основание перпендикуляра, является центром вращения точки В.
Находится натуральная величина отрезка BK (отрезок b1K, см.рис.60).
Определяется центр вращения точки С. Точка t, основание перпендикуляра, опущенного из точки С на прямую ad, является центром вращения точки С вокруг прямой АD.
Прямая ВК поворачивается вокруг оси AD до положения, когда она будет параллельна плоскости Н.
Очевидно, для определения такого положения достаточно прямую b1k совместить с прямой bk вращением вокруг точки k (прямая b2k , см.рис.60).
При вращении фигуры вокруг оси AD точка С будет перемещаться по прямой, проходящей через точку t и перпендикулярной прямой ad. Следовательно, для определения нового положения точки С достаточно найти точку пересечения прямых b2 d и ct – точка С2.
Точки а, b2 и С2 соединяются прямыми. В результате получают горизонтальную проекцию фигуры а b2 С2 , представляющую натуральную величину треугольника АВС.