

Этап 2. Синтез замкнутой сау с пи-регулятором
на заданную степень колебательности m=0.221
2.1 Расширенные частотные характеристики объекта управления по каналу регулирования.
Синтез замкнутой САУ осуществляется методом расширенных частотных характеристик.
Для определения расширенных частотных характеристик объекта по каналу регулирования необходимо в передаточной функции объекта сделать подстановку: p=-m·+j·, где m=0.221заданная степень колебательности системы:
Передаточная функция по каналу регулирования имеет вид:
-расширенная амплитудно-частотная характеристика объекта по каналу регулирования
Выражение для расширенной амплитудно-частотной характеристики найдем как отношение модулей числителя и знаменателя:

Расчетные данные для построения РАЧХ в Таблице 17. Расширенная АЧХ проходит выше обыкновенной АЧХ.
Таблица 17
|
|
0 |
0,005 |
0,01 |
0,03 |
0,04 |
0,05 |
0,1 |
0,2 |
0,3 |
0,5 |
1 |
|
A(m,) |
1,5 |
1,532 |
1,555 |
1,543 |
1,482 |
1,399 |
0,936 |
0,428 |
0,232 |
0,098 |
0,031 |
|
A() |
1,5 |
1,48 |
1,452 |
1,274 |
1,164 |
1,053 |
0,609 |
0,225 |
0,099 |
0,027 |
0,002 |
Рис.17 Расширенная амплитудно-частотная характеристика по каналу регулирования
-расширенная фазо-частотная характеристика объекта по каналу регулирования
Выражение для расширенной фазо-частотной характеристики найдем как разность аргументов числителя и знаменателя:

Функция ![]() имеет две точки разрыва, в которых
функция arctg изменяется с/2
до -/2, однако нас
интересует поведение функции при
положительном значении частоты ω. Чтобы
найти эти точки, необходимо приравнять
знаменатель функции
имеет две точки разрыва, в которых
функция arctg изменяется с/2
до -/2, однако нас
интересует поведение функции при
положительном значении частоты ω. Чтобы
найти эти точки, необходимо приравнять
знаменатель функции![]() к
нулю.
к
нулю. 
Для обеспечения непрерывности графика РАФХ необходимо прибавить период, равный -:
![]() при
при
![]() при
при
Расчетные данные для построения РФЧХ в Таблице 18. Расширенная ФЧХ проходит ниже обыкновенной ФЧХ.
Таблица 18
|
|
0 |
0,005 |
0,01 |
0,03 |
0,07 |
0,1 |
0,3 |
0,7 |
1 |
3 |
|
(m,) |
0 |
-0,111 |
-0,224 |
-0,677 |
-1,442 |
-2,383 |
-3,321 |
-4,602 |
-5,316 |
-9,491 |
|
() |
0 |
-0,11 |
-0,219 |
-0,632 |
-1,286 |
-1,646 |
-2,935 |
-4,168 |
-4,878 |
-9,053 |
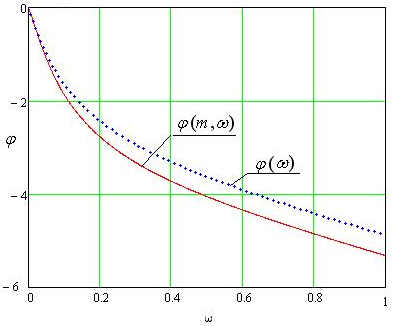
Рис.18 Расширенная фазо-частотная характеристика по каналу регулирования
2.2 Построение кривой равной степени колебательности m=0,221
Для реализации задачи синтеза САУ необходимо в плоскости настроек ПИ – регулятора построить кривую равной степени колебательности и на ней выбрать точку, соответствующую минимуму квадратичной интегральной оценки качества. Эта точка обычно находится при опт= 1.3.max, гдеmax– значение частотыв максимуме графикаS0(S1).
Чтобы заданная система имела переходный процесс с заданной степенью колебательности mнужно, чтобы РАФХ заданной системы проходила через точку с координатами (-1,j·0), т.е.:
При этом степень колебательности будет равна m. Из этих условий найдем настройки пропорционально-интегрального регулятораДля этого в передаточной функции регулятора сделаем подстановку: p=-m·+j·,:
![]()

Представим передаточную функцию объекта в показательном виде:
![]()
Используя уравнение Эйлера, получим:
![]()
Поскольку передаточную функцию
разомкнутой системы можно представить
в виде произведения передаточных функций
объекта и регулятора
![]() ,
следовательно, передаточную функцию
разомкнутой системы можно также
представить в показательном виде. В
свою очередь, условия устойчивости по
критерию Найквиста представим в
показательной форме, то есть мы можем
составить систему из двух уравнений:
,
следовательно, передаточную функцию
разомкнутой системы можно также
представить в показательном виде. В
свою очередь, условия устойчивости по
критерию Найквиста представим в
показательной форме, то есть мы можем
составить систему из двух уравнений:

Можно получить область, где находятся значения настроечных параметров S0,S1,.
Решая систему уравнений найдем настройки пропорционально-интегрального регулятора
Решение этой системы для S0,S1:
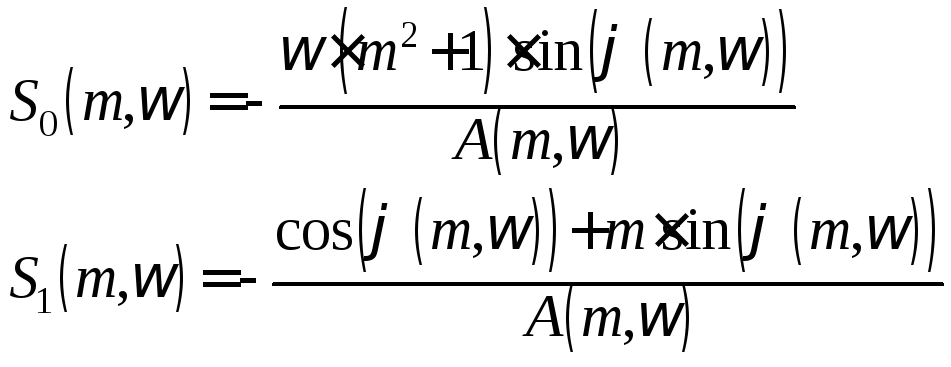
Используя полученные уравнения настроек регулятора, и задавая различные значениям , получим кривую заданной степени колебательностиm=0,221:
Расчетные данные для построения кривой равной степени колебательности в Таблице 19
Таблица 19
|
|
0 |
0,001 |
0,01 |
0,05 |
0,1 |
0,15 |
0,2 |
0,23517 |
0,25 |
0,27 |
|
S1 |
-0,667 |
-0,66 |
-0,595 |
-0,19 |
0,535 |
1,417 |
2,363 |
3,016 |
3,279 |
3,451 |
|
S0 |
0 |
0,0000153 |
0,0015 |
0,033 |
0,107 |
0,175 |
0,179 |
0,112 |
0,06 |
0,016 |
Рис.19 Кривая равной степени колебательности
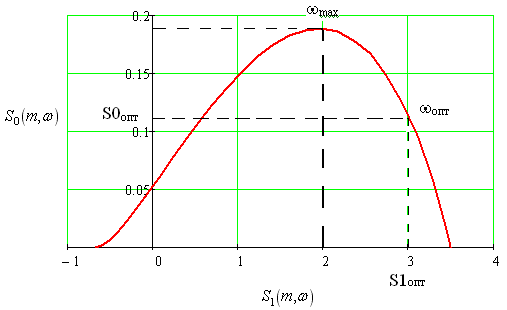
Так как объект по каналу регулирования является статическим, то кривая равной степени колебательности выходит из отрицательной области настройки S1.