

Этап 3. Анализ замкнутой сау с тремя парами настройками регулятора.
3.1 Построение амплитудно-фазовой характеристики разомкнутой системы и определение запаса устойчивости системы по модулю и по фазе
Передаточную функцию разомкнутой системы можно представить в виде произведения передаточных функций объекта и регулятора:
![]()
![]()
Для построения АФХ разомкнутой системы необходимо знать АФХ используемого регулятора. Поскольку мы рассчитываем систему с ПИ – регулятором, то сначала рассчитаем его частотные характеристики.
![]()



Для получения вещественной и мнимой частотных характеристик разомкнутой системы надо числитель и знаменатель выражения частотной передаточной функции помножить на число, сопряженное со знаменателем и упростить полученное выражение. Как было найдено ранее вещественная и мнимая характеристики разомкнутой системы при учете τ=0выражаются:

Используя полученные уравнения вещественной и мнимой частотных характеристик, и задаваясь различными значениями , получим амплитудно-фазовую характеристику разомкнутой системы. Определим запас устойчивости по модулю и фазе.
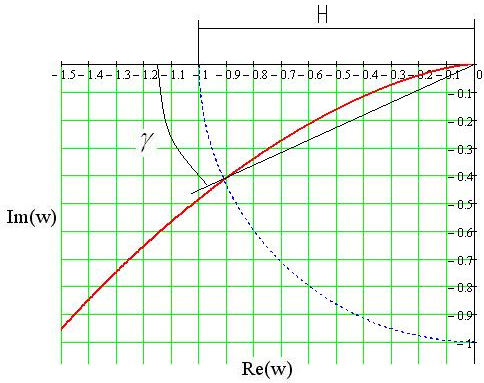
Рис.47. АФХ разомкнутой системы с оптимальными настройками и=0

При оптимальных настройках: H=1, =2474'
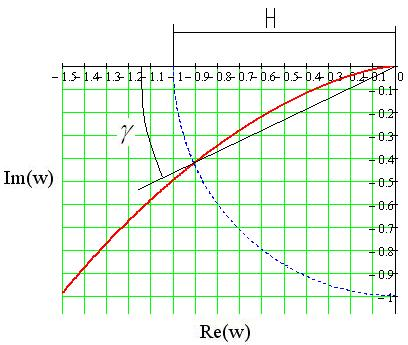
Для нахождения амплитудно-фазовой характеристики разомкнутой системы для левых настроек ПИрегулятора выполним последовательность вычислений, аналогично приведенным выше.
Рис.48. АФХ разомкнутой системы с настройками, расположенными левее оптимальных, и =0
При настройках левее оптимальных: H=1, =2453'
Для нахождения амплитудно-фазовой характеристики разомкнутой системы для правых настроек ПИрегулятора выполним последовательность вычислений, аналогично приведенным выше.
Рис.49 АФХ разомкнутой системы с настройками, расположенными правее оптимальных, и =0
При настройках правее оптимальных: H=1, =2493'
Рис. 50 АФХ разомкнутой системы с оптимальными настройками, с настройками расположенными правее оптимальных, и с настройками расположенными левее оптимальных, и =0

Заключение:
При настройках левее оптимальных: H=1, =2453'
При оптимальных настройках: H=1, =2474'
При настройках правее оптимальных: H=1, =2493'
О запасе устойчивости САУ можно судить по критерию Найквиста в следующей формулировке: если разомкнутая САУ устойчива, то для того, чтобы замкнутая САУ была устойчивой необходимо и достаточно, чтобы АФХ разомкнутой САУ не охватывала бы критическую точку с координатами (-1;j0).
В данном случае замкнутая САУ является устойчивой. Запас устойчивости по модулю Ни по фазепри всех настройках регулятора является хорошим, т.к. отсутствует запаздывание. Но настройки, взятые правее оптимальных настроек, обеспечивают больший запас устойчивости системы.
3.2 Расчет переходного процесса в замкнутой системе автоматического регулирования по каналу управления
Построение переходного процесса в замкнутой системе автоматического регулирования без запаздывания по каналу управления для упрощения выполним с помощью следующего интеграла:

Построим переходные процессы в одних осях для настроек регулятора, взятых в оптимальной точке, правее и левее:
|
|
|
S0() |
S1() |
|
Левые |
0,48438 |
0,647 |
12,2 |
|
Оптимальные |
0,51777 |
0,532 |
13,825 |
|
Правые |
0,54937 |
0,377 |
15,45 |
Рис.51 Переходный процесс замкнутой системы
п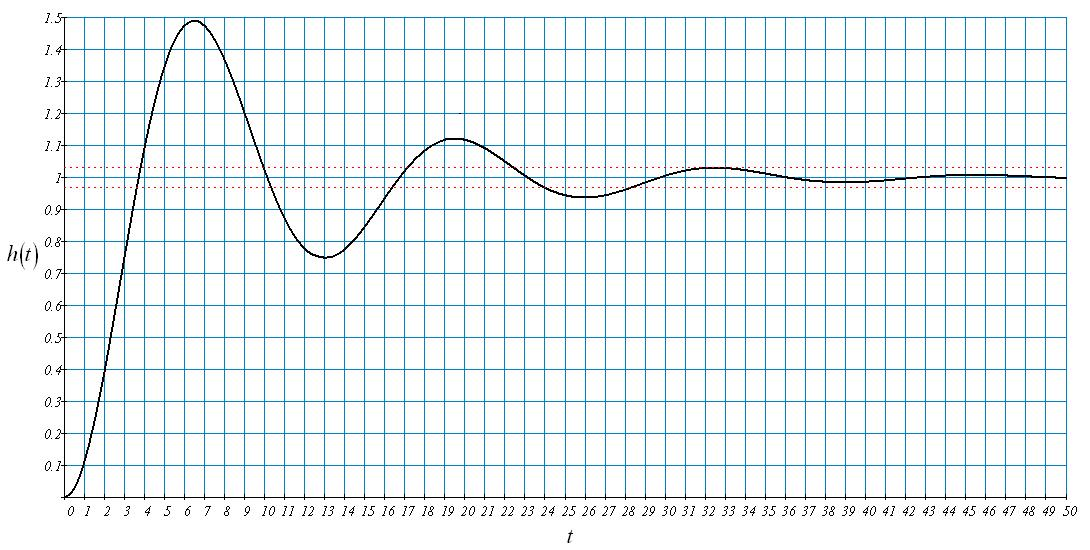 ри
настройках, расположенных левее
оптимальных и=0
ри
настройках, расположенных левее
оптимальных и=0
По полученному графику определим показатели качества для переходного процесса без запаздывания и с настройками регулятора левее оптимальных настроек.
Время переходного процесса (регулирования) T= 36 с
Величина перерегулирования (динамическая ошибка) σ = 48,9 %
Квадратичная интегральная оценка
![]()
Рис.52 Переходный процесс замкнутой системы
при оптимальных настройках и =0
П о
полученному графику определим показатели
качества для переходного процесса без
запаздывания и соптимальныминастройками регулятора.
о
полученному графику определим показатели
качества для переходного процесса без
запаздывания и соптимальныминастройками регулятора.
Время переходного процесса T= 28 с
Величина перерегулирования σ = 47,7%
Квадратичная интегральная оценка
![]()
Рис.53 Переходный процесс замкнутой системы при настройках, расположенных правее оптимальных и =0.

По полученному графику определим показатели качества для переходного процесса без запаздывания и с настройками регулятора правее оптимальных настроек.
Время переходного процесса T= 26,75 с
Величина перерегулирования σ = 46,6%
Квадратичная интегральная оценка
![]()
С целью оценки влияния запаздывания по каналу управления при оптимальных настройках регулятора на характер переходного процесса (ПП) в замкнутой системе, изобразим в одних координатных осях график ПП с запаздыванием и график ПП без него.
Рис.54 Переходные процессы замкнутой системы по каналу управления с запаздыванием =2 и без запаздывания.
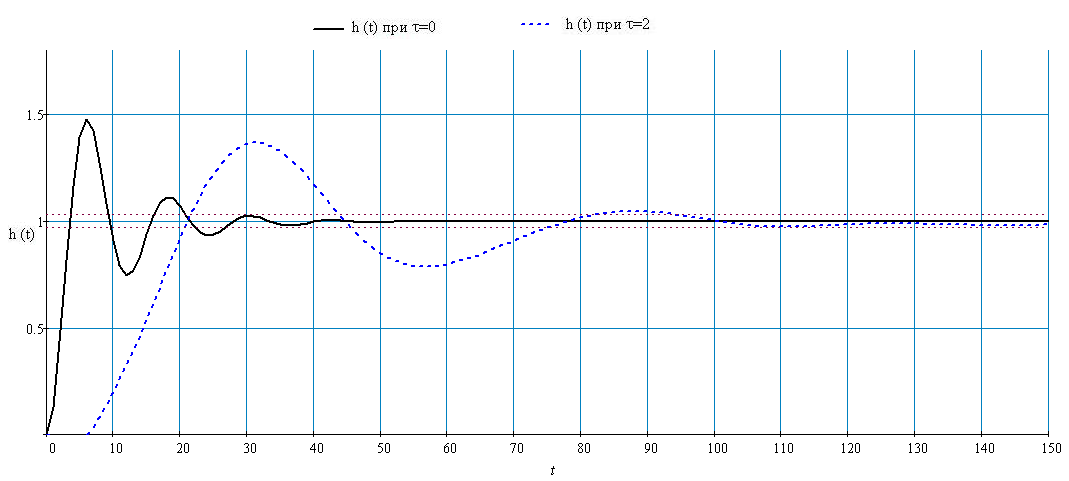
Таким образом, при появлении запаздывания в канале управления объекта регулирования график переходного процесса сдвигается по оси времени в положительном направлении на величину чистого транспортного запаздывания, а так же увеличивается длительность и перерегулирование переходного процесса.
Теперь оценим влияние расположения настроек ПИ-регулятора на характер переходного процесса в системе при времени запаздывания, равном 0. Для этого изобразим в одних координатных осях три графика переходных процессов: при оптимальных настройках ПИ-регулятора, при настройках, взятых левее оптимальных и при настройках, взятых правее оптимальных.
Рис. 55. Переходный процесс замкнутой системы с тремя парами настроек

По графику видно, что оптимальные настройки регулятора обеспечивают наименьшую величину перерегулирования. Однако настройки регулятора, взятые левее, позволяют системе быстрее выйти в установившийся режим (в зону нечувствительности). Тем не менее, именно оптимальные настройки соответствуют минимуму квадратичной интегральной оценки качества на кривой равной степени колебательности в плоскости настроек ПИ – регулятора. Поэтому именно их будем использовать при дальнейших расчетах.
При анализе переходного процесса по каналу управления на возможное появление статической ошибки установлено следующее:
