

1.2.5. Передаточная функция звена
Структура системы, статические и динамические параметры входящих элементов полностью определяют ее свойства по отношению к входному воздействию. Если известны входные и выходные величины, может быть найдена и функция преобразования или передаточная функция.
Передаточной функцией системы или звена (элемента) называют отношение изображения Лапласа для выходной и входной величин при их начальных нулевых условиях и при отсутствии других воздействий. Она полностью определяет динамические свойства звена и системы и представляет собой комплексное выражение
W(P)=Y(P)/X(P). (1.2.17)
Передаточная функция легко может быть найдена, если известно дифференциальное уравнение.
Составим передаточную функцию для простейшего элемента САР-обмотки возбуждения генератора с коэффициентом самоиндукции L и активным сопротивлением R (рис.1.2.2)
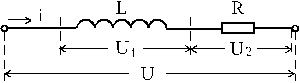
Рис.1.2.2. Схема обмотки возбуждения двигателя
При подаче на обмотку скачка напряжения U сила тока в ней нарастает в соответствии с дифференциальным уравнением
![]() . (1.2.18)
. (1.2.18)
В операторной форме это уравнение будет выглядеть как
(TP+1)i=KU, (1.2.19)
где
![]() .
.
Отсюда
![]() . (1.2.20)
. (1.2.20)
1.3. Характеристики систем автоматического регулирования
1.3.1. Типовые воздействия
Наиболее естественным состоянием системы регулирования является неустановившийся динамический режим, т.е. режим перехода от одного состояния к другому. Входные воздействия в реальных условиях работы системы могут быть самыми разнообразными.
Можно выделить три вида типовых воздействий на САР и ее элементы:
1. Гармонические колебания.
2. Единичный скачок.
3. Единичный импульс.
При действии на входе звена синусоидального воздействия
X(t) = XmSintXmejt(1.3.1)
на выходе линейной системы получаем также синусоидальные колебания
Y(t) = YmSin(t+)Ymej(t+), (1.3.2)
где Xmи Ym- амплитуды входных и выходных сигналов;= 2f - круговая частота колебаний; f - частота колебаний;- фаза колебаний.
Единичным скачком называют входное воздействие
X(t) = A1(t). (1.3.3)
При нормировании получаем единичное воздействие (рис.1.3.1)
X1(t) = 1(t), (1.3.4)
где X1(t) =0 при t0 и X1(t) =1 при t>0.
Реакцию на единичное ступенчатое воздействие называют переходной функцией:
Y(t) = F1[1(t)]. (1.3.5)
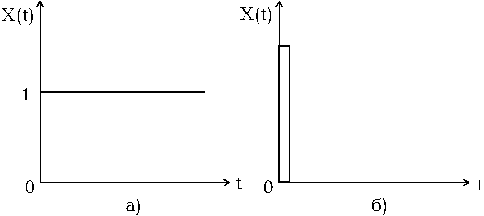
Рис.1.3.1. Типовые воздействия на САУ: а - единичный скачок; б - единичный импульс
Единичное импульсное (ударное) воздействие или дельта-функция является производной от единичной ступенчатой функции и представляет собой импульс бесконечно большой амплитуды и бесконечно малой длительности в момент t=0, т.е. (рис.1.3.1,б)
X2(t)=(t)=1'(t), (1.3.6)
где X2(t) = 0 при t0; X2(t) =при t=0.
Основное свойство дельта-функции состоит в том, что она имеет единичную площадь
![]() . (1.3.7)
. (1.3.7)
Единичную импульсную функцию можно представить как сумму действующих на вход звена со смещением во времени на двух ступенчатых воздействий функций A1(t) и A1(t-), у которых амплитуда увеличивается доодновременно с уменьшениемдо 0 при сохранении
A=1. (1.3.8)
Реакцию звена или системы на единичное импульсное воздействие называют функцией веса
(t) = F2((t)). (1.3.9)
1.3.2. Переходная характеристика
Переходной характеристикой h(t) называется временной сигнал на выходе звена (системы) при подаче на его вход сигнала в виде единичного скачка X1(t)=1(t) (рис.1.3.2).
По Лапласу (1.2.12)
![]() . (1.3.10)
. (1.3.10)
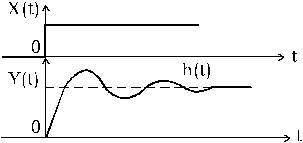
Рис.1.3.2. Переходная характеристика звена САУ
Так как Y(P)=W(P)X(P), то
![]() . (1.3.11)
. (1.3.11)
Найдем оригинал h(t) по Лапласу
![]() , (1.3.12)
, (1.3.12)
где -1- знак преобразования из изображения по Лапласу к оригиналу.
По Карсону (1.2.14) имеет в общем виде
Kf(t) = Pf(t).
Тогда
![]() , (1.3.13)
, (1.3.13)
а нахождение оригинала h(t) по Карсону
![]() , (1.3.14)
, (1.3.14)
где K-1- знак преобразования из изображения по Карсону к оригиналу.
Весовая (импульсная) характеристика будет связана с переходной соотношением
![]() . (1.3.15)
. (1.3.15)