

1.5.1. Последовательное соединение звеньев(рис.1.5.1)
![]()
Рис.1.5.1. Последовательное соединение звеньев
Пусть заданы передаточные функции всех звеньев
![]() (1.5.1)
(1.5.1)
Если перемножить все левые части и все правые части этих равенств, получим искомый результат
![]()
или (1.5.2)
т.е. передаточная функция разомкнутой цепи последовательно соединенных звеньев равна произведению передаточных функций всех звеньев.
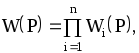
1.5.2. Параллельное соединение звеньев (рис.1.5.2,а)
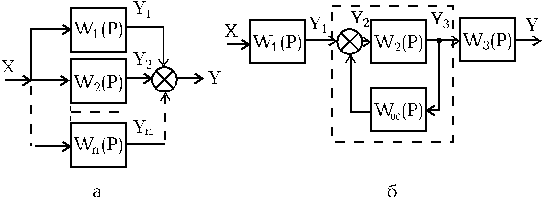
Рис.1.5.2. Параллельное (а) и встречно-параллельное (б) соединение звеньев
Пусть заданы передаточные функции звеньев
![]()
Так как выходная величина цепи равна
![]() ,
,
то передаточная функция цепи получит вид
![]() (1.5.3)
(1.5.3)
т.е. передаточная функция разомкнутой цепи из параллельно соединенных звеньев равна сумме передаточных функций всех звеньев.
1.5.3. Встречно-параллельное соединение звеньев (рис.1.5.2,б)
В таком соединении образуется замкнутый контур прохождения сигнала и создается эффект обратной связи.
Согласно схеме, обведенной пунктиром, имеем в изображениях по Лапласу
Y2(P)=Y1(P)-Yoc(P), Yoc(P)=Woc(P)Y3(P). (1.5.4)
Но далее
Y3(P)=W2(P)Y2(P)=W2(P)(Y1(P)-Woc(P)Y3(P)). (1.5.5)
Отсюда получаем
![]() . (1.5.6)
. (1.5.6)
Найдем передаточную функцию цепи с остальными звеньями путем перемножения выражения (1.5.6) с передаточными функциями последовательных звеньев:
![]() . (1.5.7)
. (1.5.7)
На основании выражений (1.5.1)...(1.5.7) можно получить передаточные функции любых соединений звеньев (рис.1.5.3).
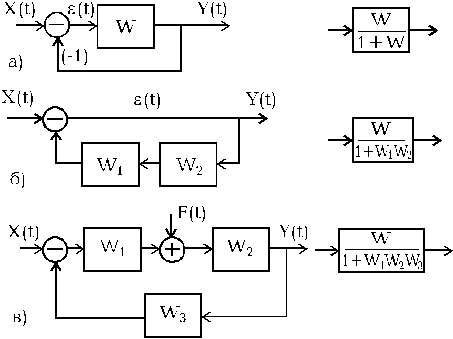
Рис.1.5.3. Эквивалентные преобразования структурных схем САУ
1.5.4. Структурные преобразования сау при переносе сумматора и воздействия параллельно контуру
Для удобства расчетов автоматических систем бывает необходимо преобразовывать структурную схему системы к какому-либо желаемому виду. Например, для построения логарифмических частотных характеристик наиболее удобно иметь цепь последовательно соединенных звеньев, тогда ЛЧХ системы просто строится суммированием ЛЧХ звеньев.
С основными правилами составления передаточных функций мы познакомились и закрепили на примере эквивалентных преобразований структурных схем САУ (рис.1.5.3):
а) САУ с главной обратной связью; б) САУ по ошибке и в) САУ по возмущающему воздействию F(t) (без входного воздействия).
Рассмотрим разработанные Б.Н.Петровым методы преобразования структурных схем, позволяющие облегчить анализ САУ.
При переносе сумматора и воздействия параллельно контуру через узлы разветвления (точки съема) сигналов учитывается направление относительного перемещения.Если это направление совпадает с направлением сигнала (рис.1.5.4,а), то для того, чтобы не изменился сигнал в узле и в отходящих от него ветвях, необходимо компенсировать это изменение путем добавления в отходящей ветви сумматора С2, аналогичного сумматору С1.
Рис.1.5.4. Перенос сумматора и воздействия параллельно контуру
Если направление переноса сумматора и воздействия встречны, то в узле эквивалентной структурной схемы необходимо добавление восстанавливающего сумматора С2 (рис.1.5.4,б).
Перенос сумматора и воздействия через звено по направлению сигнала (рис.1.5.4,в) осуществляется добавлением звена с такой же передаточной функцией.
При несовпадении направлений переноса сумматора и воздействия с сигналом преобразование осуществляется включением в воздействующие цепи звеньев с обратной передаточной функцией (рис.1.5.4,г).