

1.1.4. Системы стабилизации, программного управления и следящие
Функционирование САУ задается определенной совокупностью предписаний (алгоритмом) Yтр(t), определяющих характер изменения выходной величины объекта
Y(t) = Yтр(t).
Различные алгоритмы функционирования определяют три основных класса САУ:
1. Системы стабилизации, у которых выходная величина остается неизменной. Эти системы наименее сложны и их относят к системам автоматического регулирования (САР):
Yтр(t) = Const. (1.1.8)
2. Системы программного управления, обеспечивающие изменение выходного объекта по заданной программе непрерывно
Yтр(t) = f (X1, X2, X3, Xi ,... Xn, t) (1.1.9)
или дискретно
![]() .
(1.1.10)
.
(1.1.10)
3. Следящие системы, в которых выходная величина полностью соответствует изменениям величины, действующей на входе системы по заранее неизвестному закону
Y(t) = Yтр(t).
Следящие системы широко используются в сварочных процессах с системой телеуправления и техническим зрением.
Эти системы применяются в тех случаях, когда необходимо управлять сварочным оборудованием и контролировать его работу на расстоянии в условиях ремонтно-монтажных работ в атомной энергетике.
1.1.5. Управление по отклонению, возмущению и комбинированное
Главный принцип управления состоит в том, чтобы уменьшить отклонение выходной величины Y(t) от требуемой Yтр(t), т.е.
Y(t) - Yтр(t) = Y(t) min.
При возмущении F(t) возникает отклонение YF(t). Если компенсирующее воздействиеYu(t) будет равным по величине и обратным по знакуYF(t), то отклонения выходной величины не будет:
YF(t) = -Yu(t)Y(t) = 0. (1.1.11)
Схема САУ с управлением по возмущению приведена на рис.1.1.6.
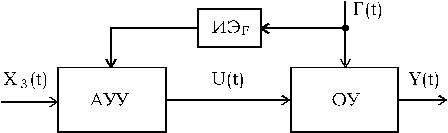
Рис.1.1.6. Функциональные схемы САУ по возмущению: ИЭF- измерительный элемент возмущения
Принцип управления по возмущению (Понселе-Чиколева)
Для уменьшения отклонения YF(t), вызванного возмущением F(t), возмущение измеряется и преобразуется АУУ в управляющее воздействие U(t), которое вызывает компенсирующее отклонениеYu(t), равное по величине и противоположное по знаку отклонениюYF(t).
Такие системы полностью компенсируют возмущение, они разомкнутые, в них нет проблем устойчивости, очень быстродействующие.
Если отклонение Y(t) возникает при изменении X3'(t) или по изменению выходной величины Y(t), то вырабатывается сигнал рассогласования (рис.1.1.7).
(t) = X3(t) - Xoc(t). (1.1.12)
Принцип управления по отклонению (Ползунова-Уатта)
Для уменьшения отклонения Y(t) производится измерение разности между заданным и текущим значениями выходной величины и в зависимости от величины и знака этого отклонения осуществляется автоматическое воздействие на ее уменьшение.
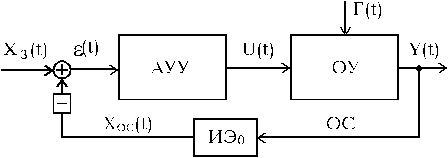
Рис.1.1.7. Функциональная схема САУ по отклонению: (t) - сигнал рассогласования; ИЭо- измерительный элемент обратной связи
Такие системы управляют выходной величиной независимо от причин отклонения Y(t) (нагрузка, температура, изменение параметров звеньев и элементов). Однако присутствует обратная связь, эти системы замкнутые и возникает проблема устойчивости.
Современные САУ высокой точности строятся на основе сочетания управлений по возмущению, т.е. комбинированное управление (рис.1.1.8).

Рис.1.1.8. Функциональная схема комбинированной САУ