

1.1.6. Непрерывное и дискретное управление
В зависимости от способа формирования управляющих воздействий САУ разделяются на системы непрерывного и дискретного управления.
В непрерывном управлении любая информация для управления в любой момент времени, а также управляющие воздействия непрерывны во времени и по величине. Связи между элементами сохраняются всегда (рис.1.1.9,б).
Дискретное управление характеризуется наличием хотя бы одного звена при прерывистом изменении управляющих воздействий (рис.1.1.9, в-е).
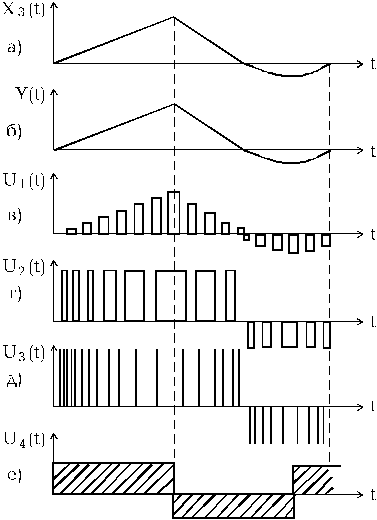
Рис.1.1.9. Способы управления в САУ: а и б - непрерывное; в - амплитудно-импульсное; г - широтно-импульсное; д - частотно-импульсное; е - релейное
Дискретное управление различается на импульсное и релейное. Импульсное управление классифицируется: амплитудно-импульсное; широтно-импульсное; частотно-импульсное и др.
В амплитудно-импульсном управлении алгоритм управления обеспечивается изменением амплитуды импульсов при неизменных остальных параметрах импульсной последовательности.
В широтно-импулльсном управлении алгоритм управления обеспечивается изменением длительности импульсов при неизменных остальных параметрах импульсной последовательности.
В частотно-импульсном управлении алгоритм управления обеспечивается изменением частоты (периода) следования импульсов при неизменных остальных параметрах импульсной последовательности.
В сложных системах управления используется помехозащищенный метод управления с помощью кодо-фазо-манипуляции.
Дискретное управление широко применяется в цифровых управляющих машинах.
1.1.7. Задачи теории автоматического управления
Ознакомившись с понятиями автоматики и автоматизации сварочных процессов, а также с классификацией САУ, можно сформулировать задачи теории автоматического управления (регулирования):
1. Изучение динамических свойств и характеристик типовых элементов (звеньев) автоматических систем.
2. Анализ и синтез функциональных и структурных схем.
3. Моделирование динамических характеристик этих систем.
4. Определение ошибок и показателей точности.
5. Исследование устойчивости замкнутых систем.
6. Оценка качества процессов управления.
7. Определение чувствительности систем к изменению параметров и других факторов.
8. Оптимизация САУ (САР).
9. Разработка САПР (систем автоматизированного проектирования) САУ (САР) и ее звеньев.
1.2. Математическое описание сау
1.2.1. Дифференциальные уравнения сау
Динамическое состояние системы можно представить в виде совокупности дифференциальных уравнений, описывающих все физические процессы - механические, электрические, электромагнитные и др., происходящие в элементах (звеньях) системы.
Для исследования же системы удобнее иметь одно общее дифференциальное уравнение, составленное на основе уравнений каждого из входящих в нее отдельных звеньев путем исключения промежуточных переменных, при этом за входную и выходную переменные каждого из них необходимо принимать те, которые указаны в функциональной схеме исследуемой системы.
При составлении и решении уравнений динамики системы следует учитывать, что коэффициенты дифференциального уравнения САУ зависят от параметров звеньев (например, момента инерции, массы, емкости, индуктивности и т.п.).
Рассмотрим механическую систему при неравномерном движении.
Если скорость какого-либо тела постоянна, то расстояние будет равно
S(t) = S0
+ Vt или Y(t) = Y0
+ ![]() t, (1.2.1)
t, (1.2.1)
где Y(t) = S - расстояние, пройденное телом
за время t;
![]() =V
- скорость тела при движении;
Y0= S0 - расстояние пройденное телом
до начала отсчета t=0.
=V
- скорость тела при движении;
Y0= S0 - расстояние пройденное телом
до начала отсчета t=0.
Если же еще и скорость непостоянна, то в общем случае расстояние будет равно
![]() или
или![]() , (1.2.2)
, (1.2.2)
где
![]() - ускорение при движении.
- ускорение при движении.
При нескольких переменных в общем виде уравнение динамики звена или САУ имеет вид
![]() , (1.2.3)
, (1.2.3)
где
![]() ,
... - управляемая переменная и ее
производные;
,
... - управляемая переменная и ее
производные;![]() ,
...- входные переменные и их производные;
,
...- входные переменные и их производные;![]() ,
...- возмущающее воздействие и его
производная.
,
...- возмущающее воздействие и его
производная.
С учетом принципа суперпозиции для линейных систем при независимых друг от друга X1, X2и F можно записать
![]() .
(1.2.4)
.
(1.2.4)
Пример. Составим дифференциальное уравнение протекания тока через обмотку возбуждения двигателя (рис.1.2.2).
![]() ,
,
где L - индуктивность; i - ток; U - напряжение; R - сопротивление обмоток.