

1. Основы теории автоматического управления
1.1. Системы автоматического управления
1.1.1. Основные понятия теории автоматического управления
Основными понятиями, использующимися в теории автоматического управления и регулирования, являются: система автоматического управления (САУ), объект управления(ОУ), управляемая величина Y(t), возмущающее воздействие F(t), задающее воздействие X(t) и управляющее воздействие (t), автоматическое управляющее устройство (АУУ), алгоритм управления U(t), обратные связи (ОС) (главные, внутренние, компенсирующие)(рис.1.1.1).

Рис. 1.1.1. Схема взаимодействия объекта управления и АУУ в САУ
Системой автоматического управленияназывается совокупность объекта управления (ОУ) и управляющего устройства, взаимодействующих между собой в соответствии с алгоритмом управления.
Объект управленияпредставляет собой совокупность технических средств (машин, устройств, алгоритмов и др.), которая нуждается в оказании организованных воздействий извне для достижения поставленной цели управления в соответствии с алгоритмом управления.
Управляемый параметр(выходной параметр объекта) (Y(t)) физическая величина (координата) объекта, которая преднамеренно изменяется или сохраняется неизменной в процессе управления.
Алгоритмом функционированияназывают совокупность правил Yтр(t), определяющих характер изменения выходного параметра объекта.
Различные алгоритмы функционирования определяют три основных класса САУ.
1. Системы стабилизации, у которых выходной параметр остается неизменным. Эти системы называют системами автоматического регулирования (САР):
Y(t) = Yтр Сonst . (1.1.1)
2. Системы программного управления, в которых выходной параметр полностью соответствует закону, определяемому программой:
Y(t) = Yтр(t).
3. Следящие системы, обеспечивающие соответствие выходного параметра изменениям входного воздействия по заранее неизвестному закону.
Отклонение выходного параметра управления Y(t) необходимо поддерживать равной требуемому значению в пределах заданной точности управления:
Y(t) = Yтр(t) Y(t). (1.1.2)
Отклонения выходной величины от требуемого значения возникают из-за наличия возмущающихвоздействий F(t), поступающих в систему в виде нагрузки на объект, изменений напряжения питающей сети и др.
Возмущающие воздействия F(t) могут быть различного характера:
- координатными Fк(t), которые изменяют непосредственно координату Y(t);
- параметрическими Fп(t), при действии которых изменяются параметры объекта и АУУ (температура окружающей среды, старение комплектующих элементов и др.).
Алгоритм управления U(t)есть совокупность предписаний, определяющих характер воздействий на объект с целью осуществления его алгоритмов функционирования.
Автоматическое устройство управления (АУУ)вырабатывает и осуществляет воздействие на объект соответственно требуемому алгоритму управления U(t).
На вход АУУ подается задающая величина X3(t), закон которой определяется алгоритмом функционирования САУ, т.е.
Y(t) = f (X3(t)) . (1.1.3)
Теперь можно сформулировать главную задачу управления: необходимо обеспечить минимальную величину отклонения Y(t) выходного параметра объекта Y(t) от ее требуемого значения Yтр(t) , т.е. в первом приближении (рис.1.1.2):
Y(t) - Yтр(t) = Y(t) min. (1.1.4)
Однако в теории принятия решений отклонение Y(t) не всегда дает объективную оценку достаточности управления или регулирования. Поэтому используется вероятностная величина отклонения от требуемого значения по минимуму суммы квадратов отклонений
![]() . (1.1.5)
. (1.1.5)
Для экономических условий возникает необходимость оценки достаточности управления, исходя из критериев экономического эффекта, времени выполнения операций и дополнительных условий, что отражается в следующем выражении:
![]() , (1.1.6)
, (1.1.6)
где C1i, C2i, C3i- коэффициенты, учитывающие экономический эффект, затраты времени и дополнительные условия выполнения операций управления.
Отклонение Y(t) проявляется в системе в результате действий возмущений F(t), а также изменениях во времени величины X3(t). При изменении X3(t) выходная величина Y(t) не сразу примет нужное значение Yтр(t), а спустя некоторое время после окончания переходного процесса. Переходной процесс может быть и колебательным, как показано на рис. 1.1.2.
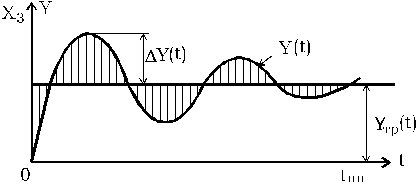
Рис. 1.1.2. Переходной процесс регулирования
Выходной параметр Y(t) достигнет требуемого Yтр(t) за время переходного процесса tпп.