

1.1.2. Структурная, функциональная и принципиальная схемы сау
Изучение и математический анализ САУ облегчается, если ее представить в виде элементов, выявить физические взаимосвязи между элементами и отобразить их графически.
Структурная схемаописывает типовые составные части САУ с отображением типовых звеньев, математическими правилами связей между ними и описываемых алгоритмами преобразования информации (рис.1.1.3).
Для синтеза САУ при проектировании устройств, а также для эксплуатации и ремонта применяют функциональные схемы САУ
.
Рис. 1.1.3. Структурная схема САУ
Функциональной схемойназывается схема, отражающая типовые функции, выполняемые в законченном виде отдельными элементами автоматической системы.
Связи между элементами обозначают линиями со стрелками, указывающими направление и обозначение сигналов. Внутри прямоугольников обычно указывают переходные функции графически или в виде математических выражений (рис.1.1.4).
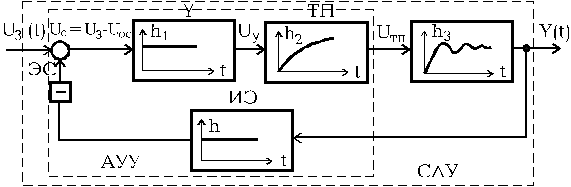
Рис. 1.1.4. Функциональная схема САУ
Для изготовления и ремонта устройств САУ необходимо подробное изображение составных электрических, электронных, электромеханических и других элементов, входящих в САУ, на принципиальной схеме.
Принципиальной схемой САУназывают схему с детальным изображением электрических, электронных, электромеханических и других элементов, входящих в САУ, для разработки, изготовления и ремонта (рис.1.1.5).
В САР применяются следующие элементы: VTI-КТ819 - автоматическое устройство управления, выполненное на транзисторе КТ819; VDI-КС156А - устройство, вырабатывающее опорное напряжение, выполненное на маломощном
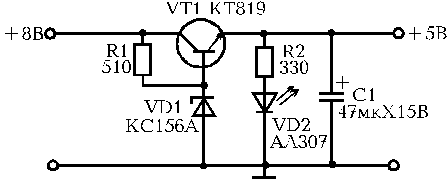
Рис. 1.1.5. Принципиальная схема САР (устройство стабилизации напряжения)
параметрическом стабилизаторе напряжения и дополнительном резисторе R 1; VD2 - АЛ307 и R2 - устройство индикации напряжения; С1 - 47мкф x 15 - электрический фильтр.
1.1.3. Обратная связь, звено, передаточная функция
Система автоматического управления (регулирования) (САУ или САР)- это замкнутая автоматическая система, основанная на принципе обратной связи управлении объектом с использованием информации о результатах управления. Так как при управлении происходит постоянное сравнение выходного параметра Y(t) с заданным Yтр(t), в результате выявляется ошибка (1.1.4)
Y(t) - Yтр(t) = Y(t) .
Эта ошибка компенсируется процессом регулирования по обратной связи (рис.1.1.3)
Y(t) = f (X3(t) - Xoc(t)), (1.1.7)
где X3(t) - заданный параметр, Xoc(t) - выходная величина ООС.
Из соотношений (1.4)...(1.7) видно, что обратная связь должна быть всегда отрицательной в автоматических системах регулирования.
Некоторые элементы автоматической системы в отдельных случаях могут отсутствовать, но главная обратная связь (ГОС) должна функционировать всегда, так как с ее помощью выявляется соответствие действительного состояния объекта регулирования заданному. Наличие главной обратной связи - основной признак САУ (САР).
Отрицательная обратная связь в САУ является главным звеном в управлении. Обратные связи подразделяются на главные, внутренние и компенсирующие.
Для математической формализации функционирования САУ на структурной и функциональной схемах выделяют элементы или звенья и математически описывают их работу с помощью передаточных функций.
Звенья или элементы САУ приведены на рис. 1.1.3...1.1.5.
На структурных схемах САУ элементы обозначены математическими моделями в виде передаточных функций:
Kэу; Wтр(t); Wg(t); Kтг.
Передаточная функцияпредставляет собой математическое описание функционирования звена САУ.
Математическое описание может быть в виде временных соотношений, дифференциальных уравнений или в параметрических изображениях по Лапласу.