

3.11. Потенциальная энергия в гравитационном поле (в поле всемирного тяготения).
Установленный Ньютоном закон всемирного тяготения гласит:
ОПРЕДЕЛЕНИЕ: Гравитационная сила
или сила тяготения – это сила, с
которой две материальные точки притягивают
друг друга, пропорциональная массам
этих точек и обратно пропорциональная
квадрату расстояния между ними
![]() ,
где – гравитационная
постоянная. Эта сила направлена вдоль
прямой, проходящей через взаимодействующие
материальные точки.
,
где – гравитационная
постоянная. Эта сила направлена вдоль
прямой, проходящей через взаимодействующие
материальные точки.
Рассмотрим два тела массами m1, m2 (считаем их материальными точками) и будем их сближать от расстояния r1 до r2.
Элементарная
работа на пути dr будет
![]() .
Полная работа
.
Полная работа
 .
.
Т.е.
 .
Величина
.
Величина
![]() (3.11)
(3.11)
называется потенциальной энергией тела в поле всемирного тяготения.
Если между телами действует сила притяжения, то Up<0;
если между телами действует сила отталкивания, то Up>0.
Из выражения (3.11) следует, что максимальное значение потенциальной энергии тяготеющие тела будут иметь тогда, когда они бесконечно (r = ) удалены друг от друга (Up = 0).
Введем величину называемую потенциалом гравитационного поля.
ОПРЕДЕЛЕНИЕ: Потенциал – это скалярная величина, численно равная работе по перемещению в гравитационном поле тела единичной массы из данной точки поля на бесконечность (r=).
![]() ;
;
 или
или
 .
Поле можно характеризовать потенциальной
энергией, которой обладает в данном
месте материальная точка.
.
Поле можно характеризовать потенциальной
энергией, которой обладает в данном
месте материальная точка.
Получаем,
что
![]() .
Зная потенциал, можно вычислить работу,
совершаемую над частицей массой «m»
силами поля при перемещении ее из
положения 1 в положение 2:
.
Зная потенциал, можно вычислить работу,
совершаемую над частицей массой «m»
силами поля при перемещении ее из
положения 1 в положение 2:
![]() .
.
В потенциальном поле можно провести поверхность, имеющую одинаковый потенциал. Такая поверхность называется эквипотенциальной.
3.12. Потенциальная энергия упруго деформированного тела.
Потенциальной энергией может обладать не только система взаимодействующих тел, но и отдельно взятое упруго деформированное тело (например, сжатая пружина, растянутый стержень и т.п.). В этом случае потенциальная энергия зависит от взаимного расположения отдельных частей тела (например, от расстояния между соседними витками пружины).
Определим
работу, которую необходимо затратить
для растяжения (или сжатия) пружины на
величину «x» (рис.3.8). Будем
считать, что пружина подчиняется закону
Гука, т.е. упругая сила пропорциональна
деформации. Будем проводить растяжение
пружины очень медленно, чтобы силу![]() ,
с которой мы действуем на пружину, можно
было все время считать равной по величине
упругой силе
,
с которой мы действуем на пружину, можно
было все время считать равной по величине
упругой силе
![]() .
Далее будем считать, что сила действует
в направлении перемещения, т.е.
.
Далее будем считать, что сила действует
в направлении перемещения, т.е.
![]() .
.
И
Рис. 3.8 
 Рис.
3.9
Рис.
3.9
Пусть
под действием силы
![]() пружина растянулась на dx,
тогда dA=F·dx=k·x·dx.
пружина растянулась на dx,
тогда dA=F·dx=k·x·dx.
Отсюда
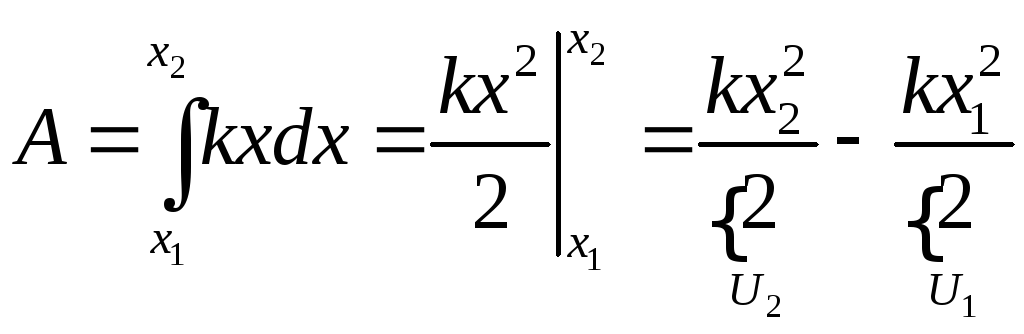 ;
;
Эта работа идет на увеличение потенциальной энергии пружины. В предположении, что потенциальная энергия недеформированной пружины равна «0» (U1 = 0) получаем
![]() (3.12)
(3.12)
– потенциальная энергия упругой деформации пружины.
|
ЛЕКЦИЯ 5 |